




- @qujia121qu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
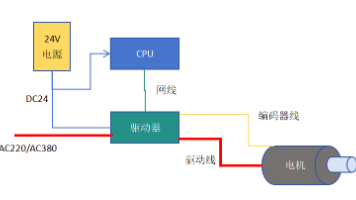
本文介绍了伺服系统运动控制编程的基础知识。主要内容包括:1.伺服系统工作原理(CPU通过驱动器控制电机,编码器反馈实现精准控制);2.基本运动控制块的调用方法(使能、点动、绝对定位、回原、急停等)及注意事项;3.手动/自动控制的实现方式;4.以5轴打磨设备为例说明自动控制编程流程(制作流程图、编写控制逻辑)。文章强调绝对定位前必须回原、定位信号上升沿有效等关键点,并分享了作者个人的编程经验和模式。
本篇主要介绍了使用博图进行运动控制编程基础知识。安装设备描述文件,伺服组态,创建工艺对象,以及一些必要的轴配置。

仓颉编程语言入门3,通过自定义一个HttpRequestDistributor,实现全请求路径监听,以及实现根据路径返回html文件。实现一个静态http服务器。

这种方式是拿mysql官方的dll,编译一下,然后再封装成仓颉数据库驱动。这种方式不够逼格,所以准备解析mysql网络协议,从0开始写一个。这就需要用到socket。但是TcpSocket是无论如何也找不到了。可能是我环境变量配置的有问题,因为运行批处理不管用,都是手动配置的,并没有配置全部环境变量。看着是不是很简单,咱们也简单写一个,如下代码,声明一个缓存区,两个socket。本来准备整仓颉链接

仓颉编程语言启动http,常见的错误及调试和处理方法。

仓颉编程语言入门3,通过自定义一个HttpRequestDistributor,实现全请求路径监听,以及实现根据路径返回html文件。实现一个静态http服务器。
这种方式是拿mysql官方的dll,编译一下,然后再封装成仓颉数据库驱动。这种方式不够逼格,所以准备解析mysql网络协议,从0开始写一个。这就需要用到socket。但是TcpSocket是无论如何也找不到了。可能是我环境变量配置的有问题,因为运行批处理不管用,都是手动配置的,并没有配置全部环境变量。看着是不是很简单,咱们也简单写一个,如下代码,声明一个缓存区,两个socket。本来准备整仓颉链接

使用springboot实现远程控制
仓颉编程语言启动http,常见的错误及调试和处理方法。