- @qq_73379310
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
基于FreeRTOS实时操作系统,主控为 STM32F103C8T6 ,机械臂为四轴分别被四个Mg90s舵机控制。本项目实现了 3 种控制方法,分别为 摇杆控制、 串口蓝牙控制 和 示教器控制。可以进行动作录制和执行。采用8路ADC采集摇杆和示教器的模拟量并由DMA搬运数据,USART串口实时收发信息,IIC驱动OLED屏幕实时显示信息。并且实现了动作录制和执行功能,动作记忆可以由二维数组或者链表

3.esp8266无法连接TCP关闭防火墙,检查端口号有没有建立,检查发送的格式有没有错漏。发送 AT+CIFSR 查看station的ip是否和你建立的tcp服务器的网段一致 需要和你电脑在同一个wifi下。

第 1 脚: VSS 为电源地第 2 脚: VDD 接 5V 正电源第 3 脚: VL 为液晶显示器对比度调整端,接正电源时对比度最弱,接地时对比度最高,对比度过高时会产生“鬼影”,使用时可以通过一个 10K 的电位器调整对比度。第 4 脚:RS 为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。第 5 脚:R/W 为读写信号线,高电平时进行读操作,低电平时进行写操作。
基于FreeRTOS实时操作系统,主控为 STM32F103C8T6 ,机械臂为四轴分别被四个Mg90s舵机控制。本项目实现了 3 种控制方法,分别为 摇杆控制、 串口蓝牙控制 和 示教器控制。可以进行动作录制和执行。采用8路ADC采集摇杆和示教器的模拟量并由DMA搬运数据,USART串口实时收发信息,IIC驱动OLED屏幕实时显示信息。并且实现了动作录制和执行功能,动作记忆可以由二维数组或者链表
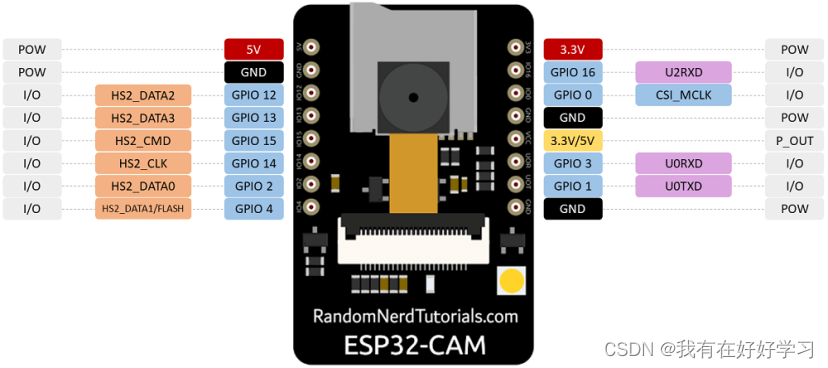
ESP32-CAM,点灯云平台Blinker,MQTT协议,APP控制,Wifi视频监控,点灯,控制舵机。