
写文章




- @qq_68844901
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
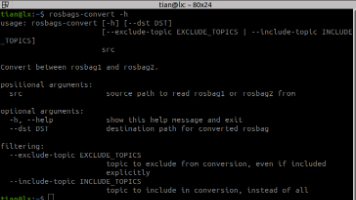
使用 rosbags 工具将 ROS 2 的数据转换为 ROS 1 的数据
使用 `rosbags` 工具将 ROS 2 的数据转换为 ROS 1 的数据
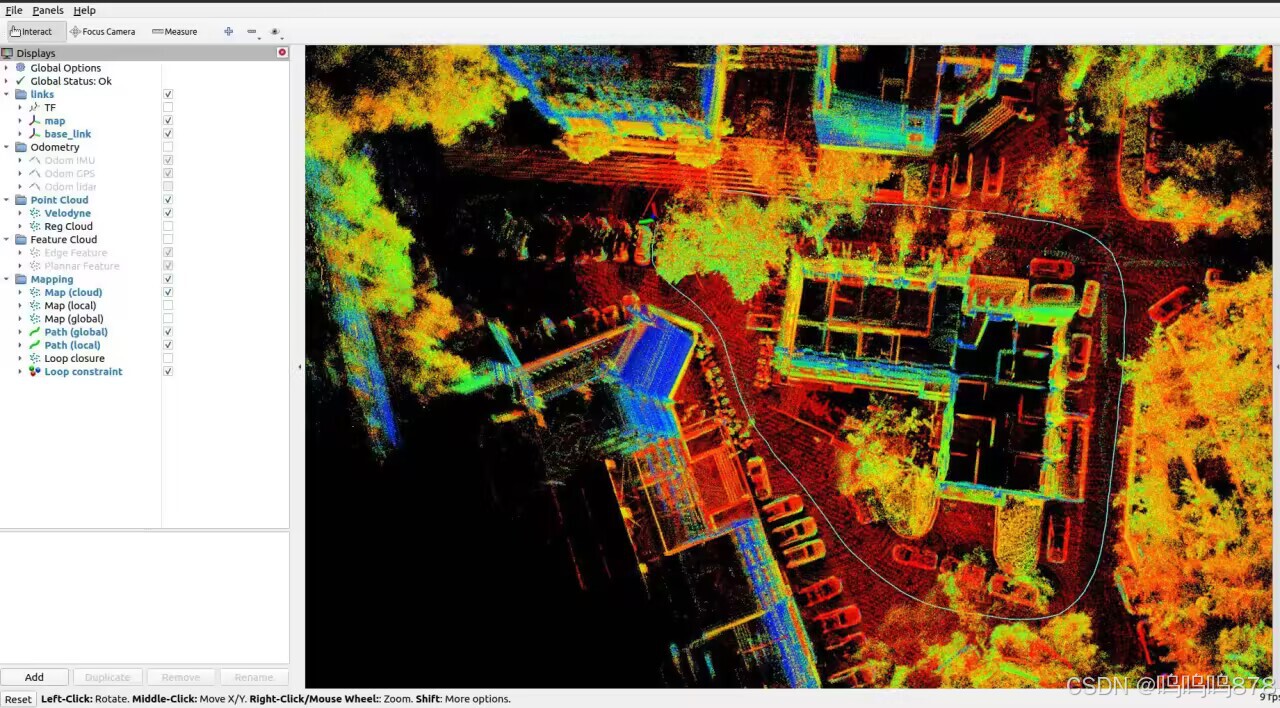
复现LIO-SAM 遇到的一些问题(IMU+激光雷达融合使用LIO-SAM建图学习)
本文源于IMU+激光雷达融合使用LIO-SAM建图学习笔记——详细、长文、多图、全流程_liosam-CSDN博客本人认为这篇博客写的非常好,很多编译上的问题全都可看教程直接解决,非常赞,但在照着这个教程复现的时候还是遇到了一些问题,便有了这个博客,作为一个记录,仅供参考,如有侵权联系删除。(如果有学习需求请一定要看先看这个博客,本文仅供参考,希望能解决一些其他的问题,设备涉及到velodyne
到底了