




- @qq_53686293
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要 本文介绍了在泰山派开发板上移植OV8858摄像头驱动并添加自动聚焦功能的过程。作者分析了原厂适配的OV5695摄像头(500万像素)性能不足的问题,选择了支持800万像素的OV8858摄像头进行移植。文章详细描述了驱动添加步骤,包括内核配置、设备树修改等硬件适配工作,并提供了摄像头购买链接。该移植方案可与作者另一篇"泰山派网络AI摄像头"项目结合使用,实现更高性能的摄像头
本文总结了Linux下屏幕与触摸驱动的开发流程,对比了正点原子IMX6ULL开发板(RGB接口LCD)和泰山派扩展板MIPI屏幕的硬件设计与驱动实现差异。通过对比分析,对linux的屏幕驱动框架会有一个更加深入的认识!
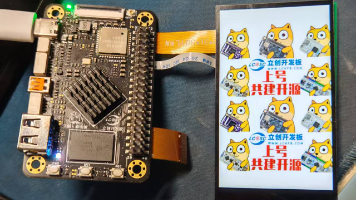
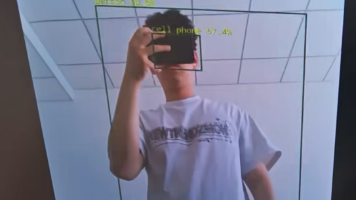
本文介绍了一个基于立创泰山派RK3566开发板的嵌入式Linux实战项目——网络AI摄像头。项目实现了摄像头实时采集、YOLOv5目标检测、硬件编码和RTSP实时推流功能。硬件采用泰山派开发板+扩展板+OV5695 MIPI摄像头,软件基于buildroot系统,整合了rockit(媒体处理)、rknn(YOLOv5推理)和ZLMediaKit(流媒体服务)三大组件。文章详细讲解了系统构建流程,包
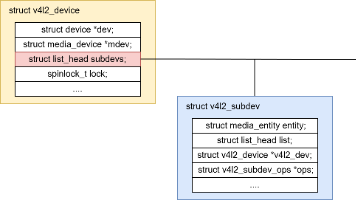
本文以RK3566平台(泰山派)的OV5695摄像头驱动为例,详细分析了Linux下MIPI摄像头驱动的实现框架。主要内容包括: 驱动整体框架分析:基于I2C驱动框架实现,核心部分为模式配置信息、设备操作函数和probe函数。 模式配置信息:通过ov5695_mode结构体定义摄像头参数,包括分辨率、帧率等,并配置对应的寄存器列表。 probe函数分析:重点解析了设备树节点(device_node
本文介绍了一个基于立创泰山派RK3566开发板的嵌入式Linux实战项目——网络AI摄像头。项目实现了摄像头实时采集、YOLOv5目标检测、硬件编码和RTSP实时推流功能。硬件采用泰山派开发板+扩展板+OV5695 MIPI摄像头,软件基于buildroot系统,整合了rockit(媒体处理)、rknn(YOLOv5推理)和ZLMediaKit(流媒体服务)三大组件。文章详细讲解了系统构建流程,包
摘要 本文介绍了在泰山派开发板上移植OV8858摄像头驱动并添加自动聚焦功能的过程。作者分析了原厂适配的OV5695摄像头(500万像素)性能不足的问题,选择了支持800万像素的OV8858摄像头进行移植。文章详细描述了驱动添加步骤,包括内核配置、设备树修改等硬件适配工作,并提供了摄像头购买链接。该移植方案可与作者另一篇"泰山派网络AI摄像头"项目结合使用,实现更高性能的摄像头
本文介绍了一个基于立创泰山派RK3566开发板的嵌入式Linux实战项目——网络AI摄像头。项目实现了摄像头实时采集、YOLOv5目标检测、硬件编码和RTSP实时推流功能。硬件采用泰山派开发板+扩展板+OV5695 MIPI摄像头,软件基于buildroot系统,整合了rockit(媒体处理)、rknn(YOLOv5推理)和ZLMediaKit(流媒体服务)三大组件。文章详细讲解了系统构建流程,包
本文介绍了一个基于立创泰山派RK3566开发板的嵌入式Linux实战项目——网络AI摄像头。项目实现了摄像头实时采集、YOLOv5目标检测、硬件编码和RTSP实时推流功能。硬件采用泰山派开发板+扩展板+OV5695 MIPI摄像头,软件基于buildroot系统,整合了rockit(媒体处理)、rknn(YOLOv5推理)和ZLMediaKit(流媒体服务)三大组件。文章详细讲解了系统构建流程,包