
写文章




- @qq_48772747
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
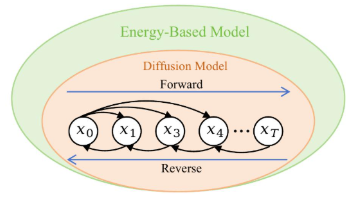
科研小白的论文精读:机器人操作中的扩散模型
扩散模型说的是。
Ros2完全入门指南(1):Ros2的概述与环境搭建
本文介绍了ROS2(Humble版本)的安装、测试及基本开发流程。主要内容包括:1. 推荐使用Codex或小鱼一键安装ROS2;2. 环境测试方法(节点检查、版本确认);3. Python节点开发完整流程:创建工作空间→创建功能包→编写节点→配置setup.py→编译运行;4. Launch文件使用方法;5. 常用ROS2指令分类总结(环境检查、话题、节点、服务、参数等);6. 标准工作流程示范。

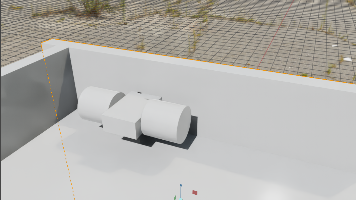
Issac Sim完全入门指南 (3): 机器人组装与传感器添加(以Gemini335L Camera为例)
本文介绍了在IsaacSim仿真环境中构建机器人系统的基本流程。主要内容包括:1)通过基础模型组装两轮差速机器人,包含杆件创建、关节连接和关节树设置;2)为关节添加驱动控制,实现目标速度运动;3)添加相机传感器,包括物理属性设置和视角窗口配置。文章详细说明了从零部件组装到运动控制的全过程,并强调了关节树概念对提高仿真精度的重要性。最后演示了如何通过多视口观察机器人运动状态,为后续更复杂的机器人仿真
Issac Sim完全入门指南 (3): 机器人组装与传感器添加(以Gemini335L Camera为例)
本文介绍了在IsaacSim仿真环境中构建机器人系统的基本流程。主要内容包括:1)通过基础模型组装两轮差速机器人,包含杆件创建、关节连接和关节树设置;2)为关节添加驱动控制,实现目标速度运动;3)添加相机传感器,包括物理属性设置和视角窗口配置。文章详细说明了从零部件组装到运动控制的全过程,并强调了关节树概念对提高仿真精度的重要性。最后演示了如何通过多视口观察机器人运动状态,为后续更复杂的机器人仿真
到底了