
写文章




- @qq_48620003
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
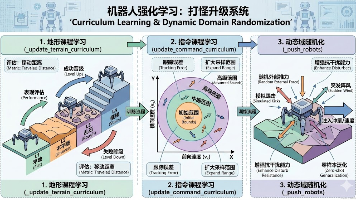
【legged_gym学习】legged_robot.py部分解读五(课程学习与动态干预 Curriculum & Dynamic Interventions)
在上一篇文章中,我们打通了从神经网络到物理引擎的“任督二脉”,让机器人拥有了执行动作的能力。但训练一个复杂的强化学习策略往往面临一个巨大的悖论:如果环境太简单,机器人学不到真本事;如果环境太复杂,机器人由于初期总是失败,根本收集不到有效的正向奖励,最终什么也学不会。课程学习与域随机化(动态篇),就是一套为机器人量身定制的“打怪升级”系统。我们将深入探讨等核心函数,看看 AI 是如何一步一个脚印征服
【legged_gym学习】legged_robot.py部分解读五(课程学习与动态干预 Curriculum & Dynamic Interventions)
在上一篇文章中,我们打通了从神经网络到物理引擎的“任督二脉”,让机器人拥有了执行动作的能力。但训练一个复杂的强化学习策略往往面临一个巨大的悖论:如果环境太简单,机器人学不到真本事;如果环境太复杂,机器人由于初期总是失败,根本收集不到有效的正向奖励,最终什么也学不会。课程学习与域随机化(动态篇),就是一套为机器人量身定制的“打怪升级”系统。我们将深入探讨等核心函数,看看 AI 是如何一步一个脚印征服
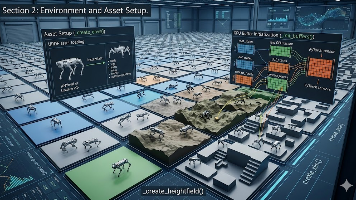
【legged_gym学习】legged_robot.py部分解读三(环境与资产初始化 Environment & Asset Setup)
模块是整个 RL 训练框架的基础建设。它不仅决定了机器人模型的物理准确性,更通过预分配显存和 Tensor Wrapping 技术,锁死了整个系统的高性能上限。做好了这一步,后续的控制逻辑和网络训练才能在一个稳固且极速的世界中狂奔。
到底了