




- @qq_46276154
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
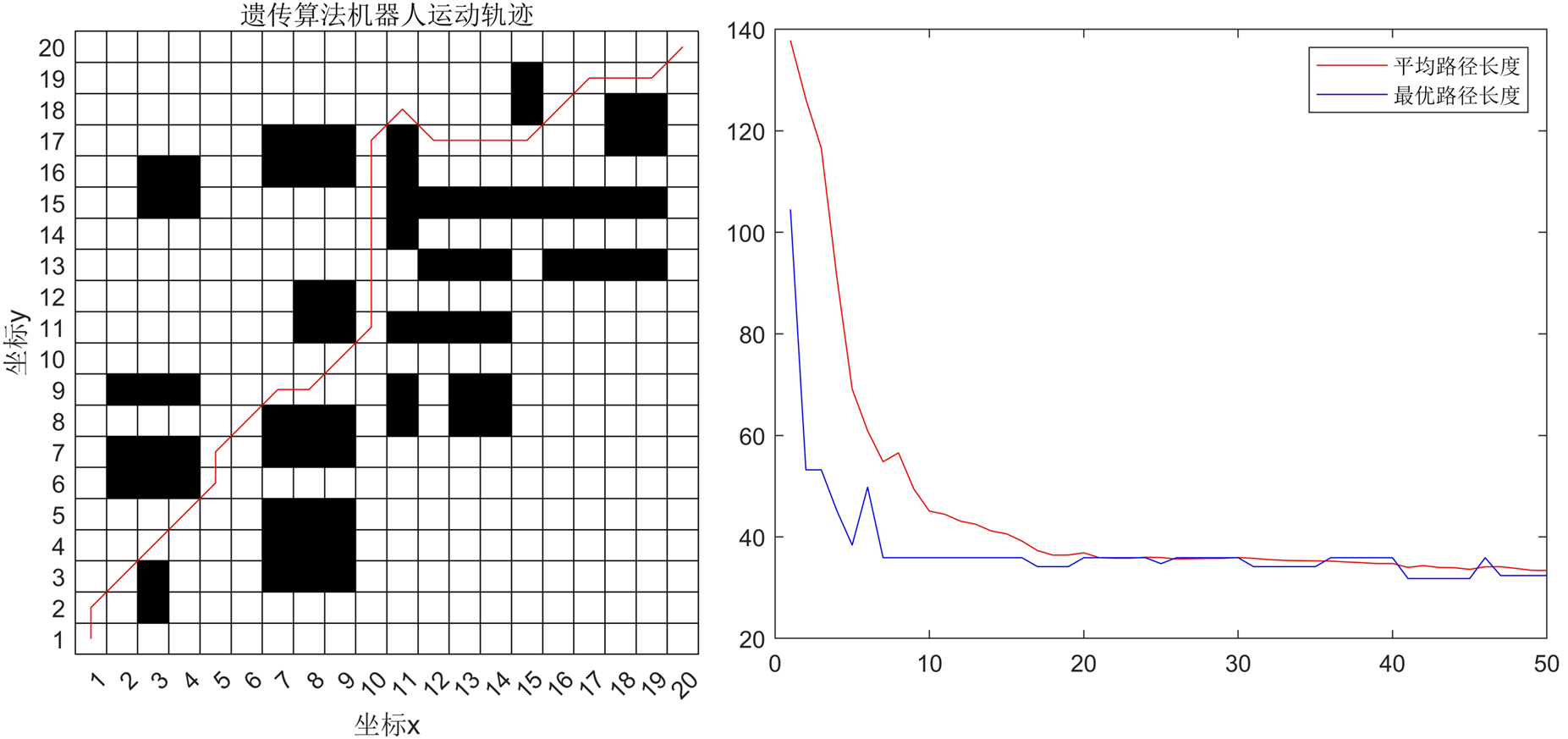
文章目录一、遗传算法1.1 编码与解码1.2 选择算子-轮盘赌法1.3 交叉算子1.4 变异算子1.5 遗传算法流程1.6 基于遗传算法的栅格法机器人路径规划二、采用模拟退火算法改善适应度函数一、遗传算法遗传算法 (Genetic AIgorithm, 简称 GA)起源于对生物系统所进行的计算机模拟研究,是一种随机全局搜索优化方法,它模拟了自然选择和遗传中发生的复制、交叉 (crossover)
文章目录一、遗传算法1.1 编码与解码1.2 选择算子-轮盘赌法1.3 交叉算子1.4 变异算子1.5 遗传算法流程1.6 基于遗传算法的栅格法机器人路径规划二、采用模拟退火算法改善适应度函数一、遗传算法遗传算法 (Genetic AIgorithm, 简称 GA)起源于对生物系统所进行的计算机模拟研究,是一种随机全局搜索优化方法,它模拟了自然选择和遗传中发生的复制、交叉 (crossover)
3.选中该图形,选择开发工具->操作->修剪。选择开发工具-操作选项,并分别依次点击。2.使用圆形和直线绘制如图所示图形。1.文件->选项->开发工具。,最后选要填充的颜色即可。
一、8086的寻址方式(以MOV指令为例)①计算机指令,通常包含操作码(Opcode)和操作数(Operand)两部分,操作码指出操作的性质,操作数给出操作的对象。②寻址方式就是指令中说明操作数所在地址的方法。 ③8086寻址空间为1MB。④指令有单操作数、双操作数和无操作数之分。如果是双操作数,要用逗号分开,左边的为源操作数,右边的为目的操作数。⑤立即数寻址可直接从指令队列中取数,指令执行速度较
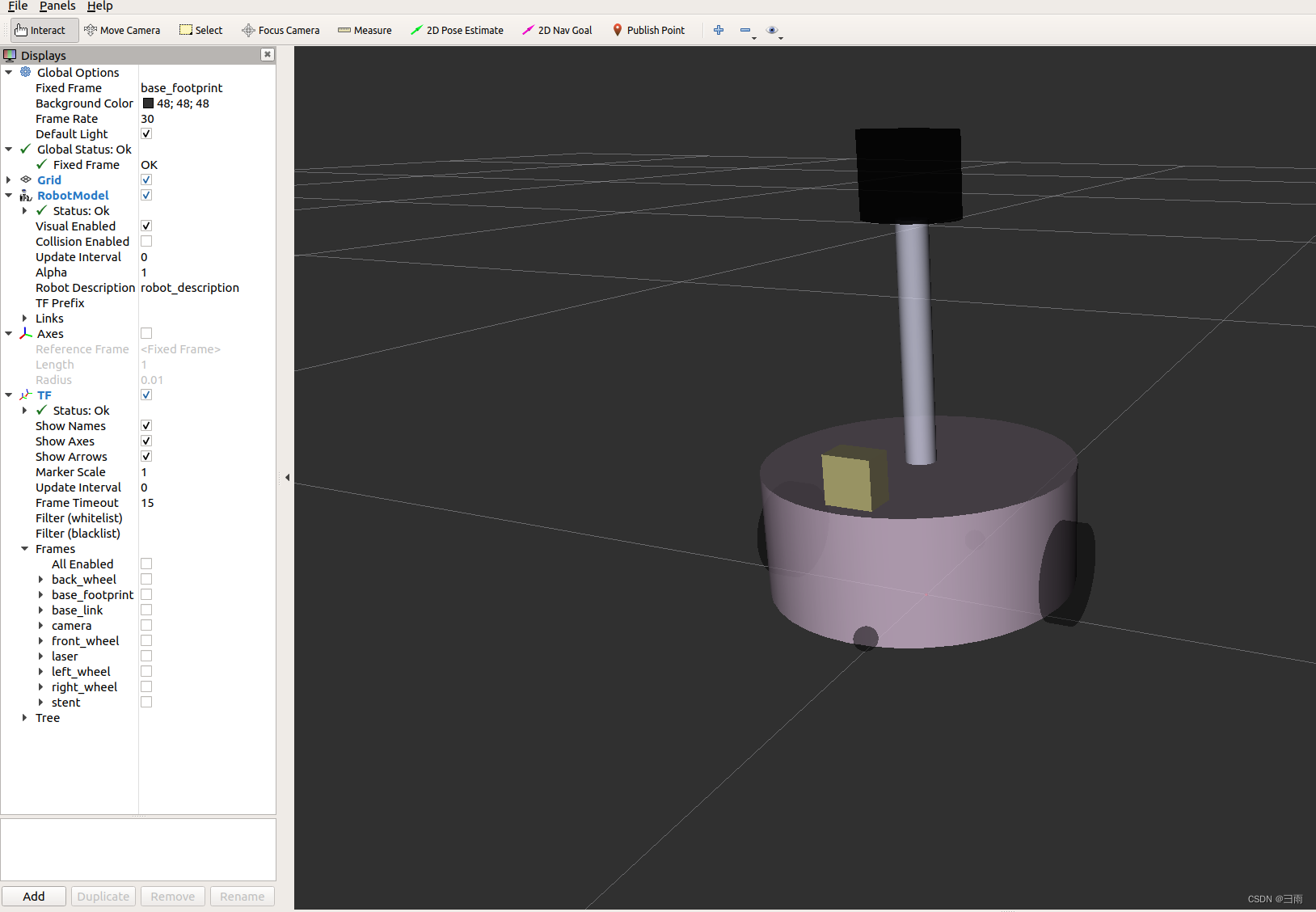
文章目录一、urdf集成rviz1.1 基本流程1.2 优化 rviz 启动二、urdf语法详解2.1 robot2.2 link2.3 joint2.4 urdf练习2.5 urdf工具三、URDF优化_xacro3-1 Xacro_语法详解3-2 Xacro_完整使用流程示例3- Xacro_实操一、urdf集成rviz1.1 基本流程需求描述:在 Rviz 中显示一个盒状机器人实现流程:1.
STM32-GPIO和定时器的使用