
写文章




- @qq_45950599
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
yolov8 目标检测、分割、姿势估计、跟踪任务(Python代码)
yolov8目标检测、追踪、分割、姿势估计

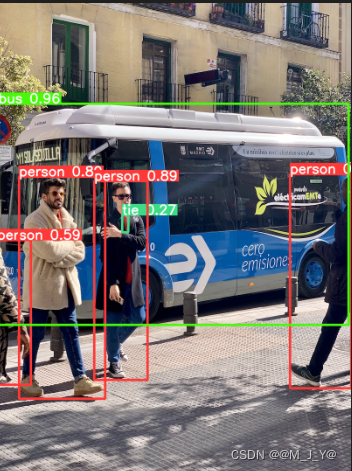
目标检测(yolov9)
首先需要从github上拉取yolov9的仓库,下载预训练权重文件yolov9-c.pt到当前文件夹,创建data/images文件夹,并将要推理的图片放到文件夹中,直接运行detect.py文件,它会自动安装需要的依赖,具体代码如下。直接将if判断去掉将 prediction = prediction[0]放到外面。据我所知,第902行如下代码并未执行,所以prediction的类型依然为lis
到底了