
写文章




- @qq_45783225
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
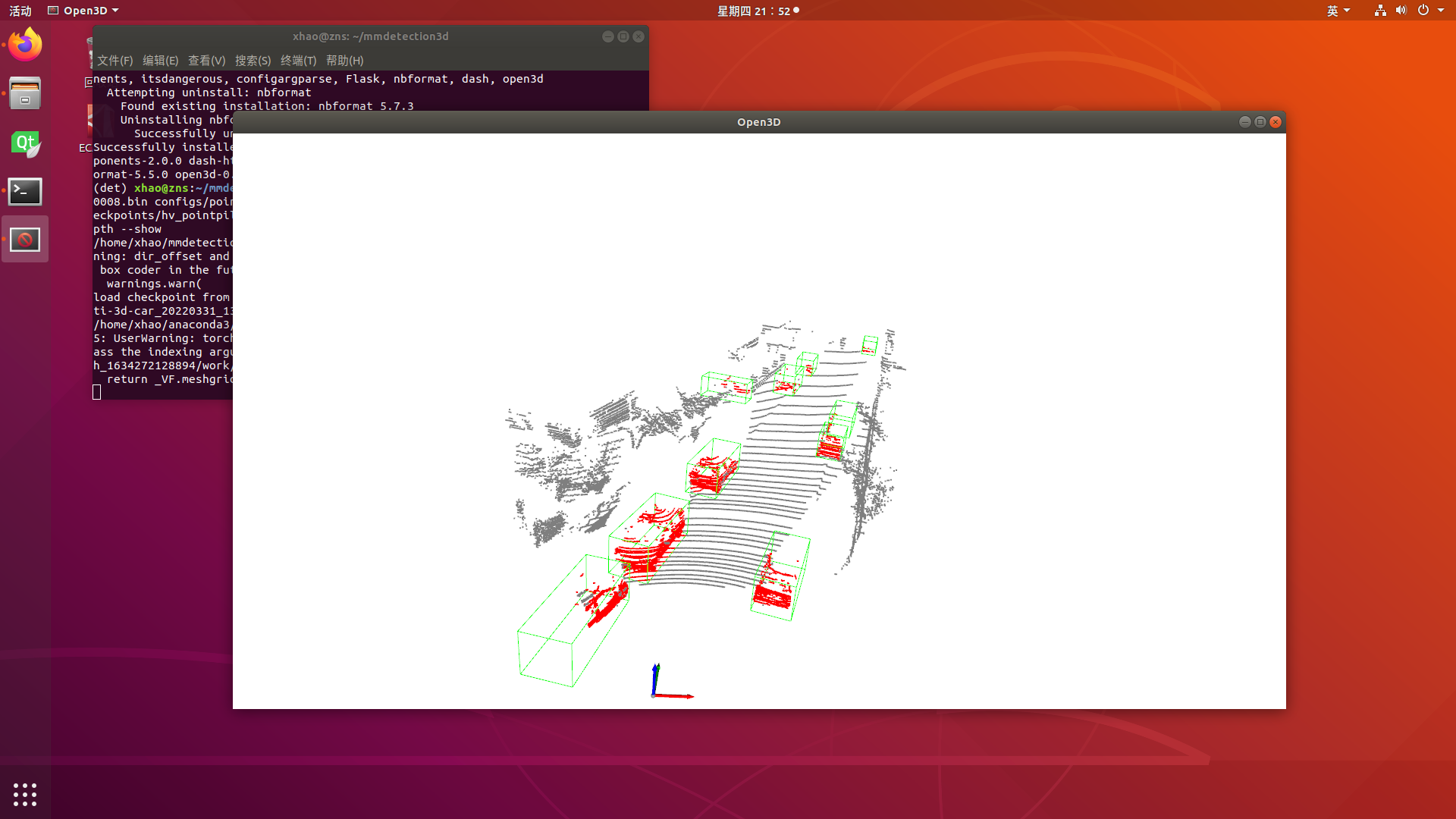
mmdetection3d系列--(1)安装步骤(无坑版)
mmdetecion3d无坑版安装教程。在这里记录一下正确的安装流程,已备再次查阅,也给大家提供一点参考。
BEV下多传感器融合知识准备
说完了融合需要在BEV下进行的必要性,下面继续讲方法,我们只道,对于本来就是3D的点云数据来说,BEV只是一种更低级的表达方式,简答说只需要忽略Z轴上的信息即可,也就是从上向下看点云。BEV无非是一种视角,以往的算法基本上都集中在前视的感知上,但是当需要的传感器多起来之后,再使用前视便浪费了资源,也不方便融合。以CL为例,即把图像数据和点云数据都投射到BEV视角下在进行融合,这样不仅方便融合,提高

到底了