




- @qq_43680965
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
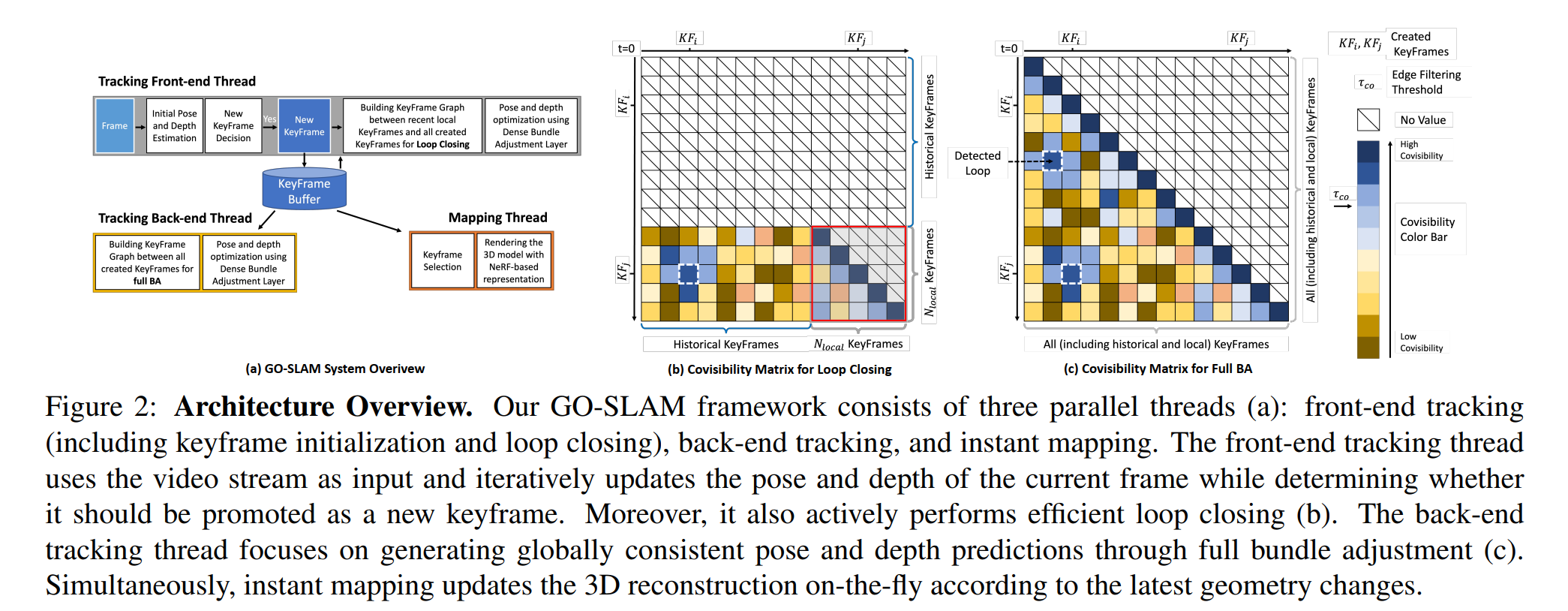
消费级深度传感器容易产生噪声,这就导致 RGB-D SLAM 会丢失一些几何细节,导致过度平滑。使用轻量级的相机传感器是一种趋势,然而,它们的 representations(点云、曲面、volume)在形状提取时缺乏灵活性,重建的准确度就会下降。基于 NeRF 的视觉 SLAM 可以在小尺度场景中实现精确的三维重建和相机位姿估计。然而目前的工作由于缺乏全局在线优化,如 loop closure
可以看到YOLOv7在速度和准确度上较之前的检测器有非常明显的提升。作者提出了一种新的实时目标检测架构,针对解决重参数化模块的替换和动态标签分配问题,提出可训练的bag-of-freebies方法来提高准确度。(1)更好地适配移动端(2)关注训练过程的优化,而不增加推理成本(3)plannedre-parameterizedmodel,用梯度传播路径的概念分析了适用于不同网络中layers的模型重
数据库系统会将 SQL 编译成查询计划。查询计划是一棵运算符树。
题意:给出a串和b串,有k次操作,每次操作将a串分割成两份,并将后一个子串接到前面,求有多少个这样不同的过程。题解:dp打王者,每天写题解。(逃#define _CRT_SECURE_NO_WARNINGS#include<iostream>#include<cstdio>#include<string>#include<cstring>...
题意:给出n个城市的x,y坐标以及每个城市的人数, 这些城市的主人想建造最小生成树,这时候有个会魔法的道士说, 我可以让一条路权值为0, 求A/B的最大值, 其中A是权值为0的道路连接的两个城市的人数之和, B是最小生成树的权值。题解:次小生成树先求一遍mst,有一点跟次小生成树不同的是,若是mst上的边,也可以将其边权置为0。#define _CRT_SECURE_NO_WARNINGS#inc
题意:给出n种材料,每种材料给出单个高度,最大限制高度和数量,求最高能堆多高。题解:多重背包因为每个材料都有限制高度,我们先排个序。每种材料的高度是在前者叠加高度再累加上去的,所以将dp[a[i].maxh]dp[a[i].maxh]dp[a[i].maxh]的值都赋值给后面一个材料。#define _CRT_SECURE_NO_WARNINGS#include<iostream&...
题意:给出起点、终点,求最短路。题解:dijkstra放在堆这个专题大概是最小堆优化吧。#define _CRT_SECURE_NO_WARNINGS#include<iostream>#include<cstdio>#include<string>#include<cstring>#include<algorithm>#include&
题意:有一序列,每两个元素可以相互合并成一个元素,x-y或者y-x。求最后留下的一个元素最大。题解:思维有正有负的时候,必为绝对值之和。全为正:绝对值和 -2 * min。全为负:绝对值和 + 2 * max。#define _CRT_SECURE_NO_WARNINGS#include<iostream>#include<cstdio>#include...
题意:给出n,求有几组能将n表示为两素数和的方法。题解:素数筛wa了无数次给我整蒙了,数组大小太难把控了,vector无敌好吧。#define _CRT_SECURE_NO_WARNINGS#include<iostream>#include<cstdio>#include<string>#include<cstring>#include<al
题意:nnn个不同规格长方体,求能垒多高,长宽严格递减。不同规格长方体数量不限。题解:dp按长宽排序,跟求LISLISLIS一样。#define _CRT_SECURE_NO_WARNINGS#include<iostream>#include<string>#include<cstring>#include<algorithm>co...