
写文章




- @qq_40923056
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
机器人学笔记-5雅可比矩阵
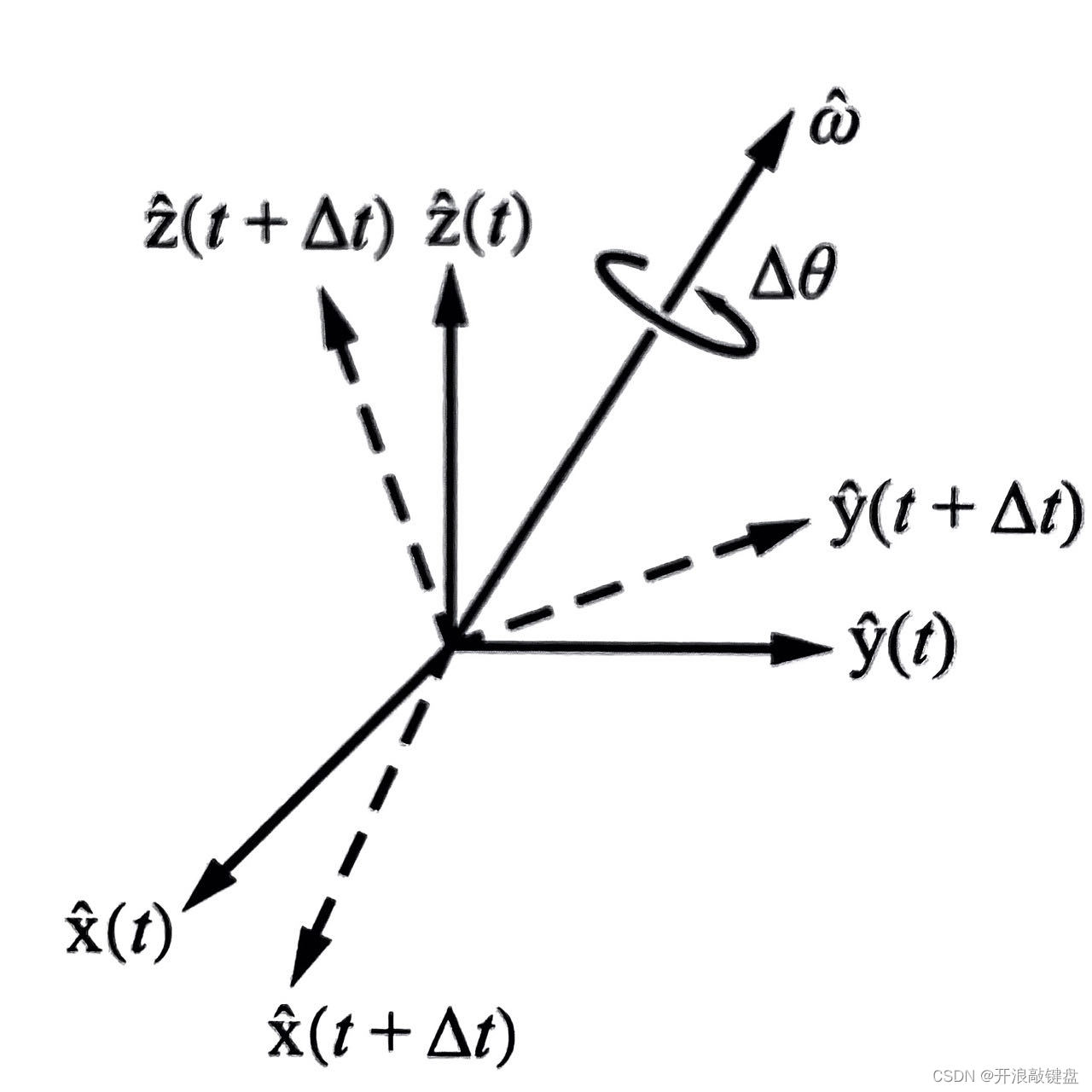
显然在各个方向上的运动性能好于前者,前者在空间中朝着第一三象限的运动能力很弱,但是在第二四象限运动能力很显著,而其实在奇异位形的时候,可操作度椭圆退化为一条线,所以我们可以用椭圆的面积是正相关于可操作度的(也就是远离奇异位形的程度),椭圆的面积为。因为机器人相邻两个杆件坐标系之间都有关节连接,如果是转动关节的话,那么两个坐标系之间的相对角速度很容易求出就是一个大小为关节变量,方向为驱动轴的向量,但
机器人学导论(John J Craig,2017)学习笔记(更新中)
Lecture1 IntroductionIntroduction of roboticsreference textbook:1. Cai ZiXing,20151. Saeed B. Niku.,20132. Siciliano,B.,2010Types of robotsrobot{Robot manipulatorsMobile robots{Ground r

到底了