
写文章




- @qq_38958812
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
攻克Sim to Real Gap:机器人智能落地的关键突破
摘要: "Sim2RealGap"指仿真训练模型迁移到现实时性能下降的现象,源于物理建模偏差、感知信息差异和环境细节缺失。核心影响包括智能体在现实中的失效行为(如机械臂抓取失败)。解决思路分为四类:1)增强仿真真实性(高保真物理建模、域随机化);2)优化模型泛化能力(迁移学习、元学习);3)硬件在环(HIL)实现虚实闭环交互;4)结合少量现实数据微调。实际应用中需多方法协同,如
Opencv4.7.0+opencv_contrib编译笔记
依次将15个的每个https://raw.githubusercontent.com/opencv/opencv_3rdparty/fccf7cd6a4b12079f73bbfb21745f9babcd4eb1d/vgg_generated_120.i添加到。取消勾选不需要的部分 test ,java,python,BUILD_DOCS,BUILD_PACKAGE,BUILD_EXAMPLES。/
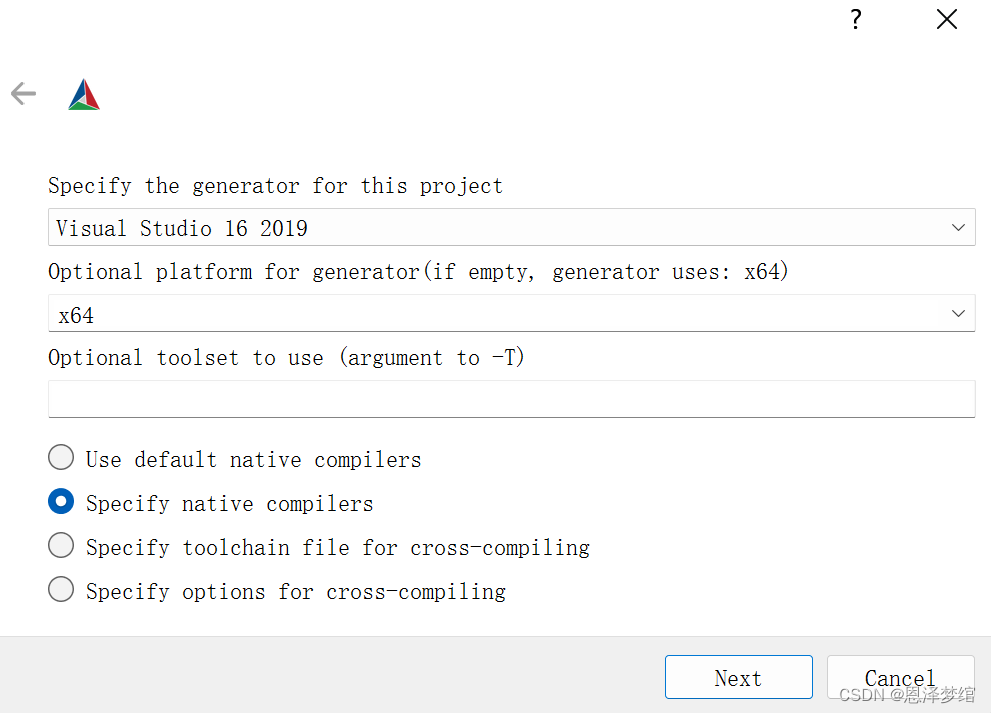
QT6.4.3+Opencv4.7.0+CMake3.26.0配置
将face_landmark_model.dat下载完成之后,在\sources\.cache\data文件夹下,找到源文件.dat,复制下文件名(校验码+face_landmark_model.dat),修改名称,将下载的face_landmark_model.dat拷贝过来,替换源文件。查找 test ,将OPENCV_PERF_TESTS、BUILD_TESTS、BUILD_opencv_p
到底了