




- @qq_33243369
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
以下是仿真所用代码%遗忘因子递推最小二乘参数估计(FFRLS)clear all; close all;a=[1 -1.5 0.7]'; b=[1 0.5]'; d=3; %对象参数na=length(a)-1; nb=length(b)-1; %na、nb为A、B阶次L=400; %仿真长度uk=zeros(d+nb,1); %输入初值:uk(i)表示u(k-i)yk...
用PID好多次了,用来做过智能车,用来做过四轴.PID不难理解,不难应用,网上也有许多介绍PID的帖子文章什么的,有介绍原理公式的,有讲怎么调节的,资料特别多,我就不写那些陈腔滥调了,我写点感觉网上大多数的帖子没涉及到的或是没有着重指出的,初学者容易忽略,但又挺重要的地方.一.区别PID公式和调节口诀常用的是位置式和增量式公式分别如下:位置式连续位置式离散注意此时Kp=Kp,
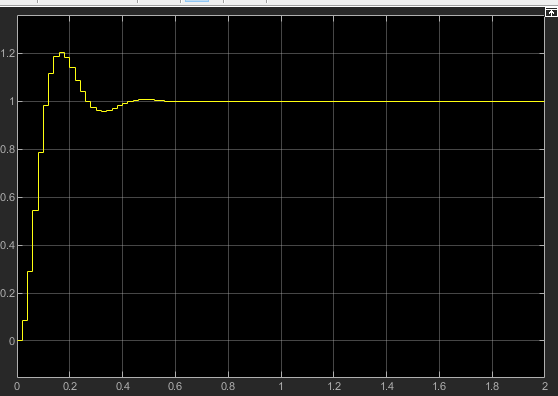
ADRC控制算法仿真(基于MATALB和Simulink)首先放仿真结果仿真文件下载首先放仿真结果首先是总的系统图.输入为正弦信号,控制对象的传递函数为:干扰信号为终值0.2的阶跃函数。仿真波形图如下:跟踪效果还不错。仿真文件下载。。。。。待审核...
文章目录Enabling the Remote API - client side启用远程API- 客户端Enabling the Remote API - server side 启用远程API- 服务器端Remote API Functions (Matlab) 远程API(MATLAB)simxAddStatusbarMessagesimxAppendStringSignalsi...
https://www.jianshu.com/p/a31ae1d2c1a2最终效果有些延迟,可能是我电脑太辣鸡.以及用机器人工具箱建立的机械臂的DH矩阵的显示如下:这个机械臂即V-rep中的example的第一个,注意使用时要先将IK group删除,删掉dummy之间的link.Matlab中的代码:建立DH矩阵:cleardeg = pi/180;L(1) = R...
简介模型预测控制(Model Predictive Control,MPC),或简称预测控制。 最早产生于工业过程的预测控制算法,有建立在对象脉冲响应基础上的模型预测启发控制(Model Predictive Heuristic Control,MPHC),或称模型算法控制(Model Algorithmic Control,MAC),以及建立在对象阶跃响应基础上的动态矩阵控制(Dynami..
最近看完了系统辨识课程的讲义,总结一下讲义上的内容:系统辨识分为系统结构辨识和系统参数辨识。课程的内容是系统参数的辨识,即假设系统结构已知。辨识的四要素:输入输出数据,模型集,准则函数,优化方法。课程中模型的结构已知,实际的辨识中会存在多个可能的模型结构,构成待辨识的模型集。A(z)=1+a1z−1+a2z−2+.....+anaz−naA(z)=1+a_1z^{-1}+a_2z^{-2}...
简介模型预测控制(Model Predictive Control,MPC),或简称预测控制。 最早产生于工业过程的预测控制算法,有建立在对象脉冲响应基础上的模型预测启发控制(Model Predictive Heuristic Control,MPHC),或称模型算法控制(Model Algorithmic Control,MAC),以及建立在对象阶跃响应基础上的动态矩阵控制(Dynami..
写在最前面:本身是我的鲁棒控制课程的大作业,这篇博客里包含了四种控制器的设计方法,一是极点配置,而是LQR,三是H无穷扰动抑制,四是H无穷跟踪控制,希望可以能看到我博客的人一些参考。代码和仿真模型的度盘链接会放在博客的最下面,自取,链接挂了在评论区留言,有问题也欢迎指正(有问题评论区可以问,当然我也不一定会哈哈,还有如果这篇博客已经是个很久的博客,还是不要再问我相关的问题了,因为很久之后我应该都忘
这个的意思是br0设备或者其它网卡转发数据包从eth0网口出去的时候更改数据包中的源ip地址(改成eth0的ip地址),这是为了让桥设备收到数据包之后,根据数据包中的目标ip地址查找host中的路由表进行数据包转发。10.配置完这些之后,还需要配置DNS,安装network-manager。暴露给guest端的e1000网卡跟host上的tap0关联。进行网络配置,我翻了好多博客,就这个是好用的。
