




- @qq_27816785
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
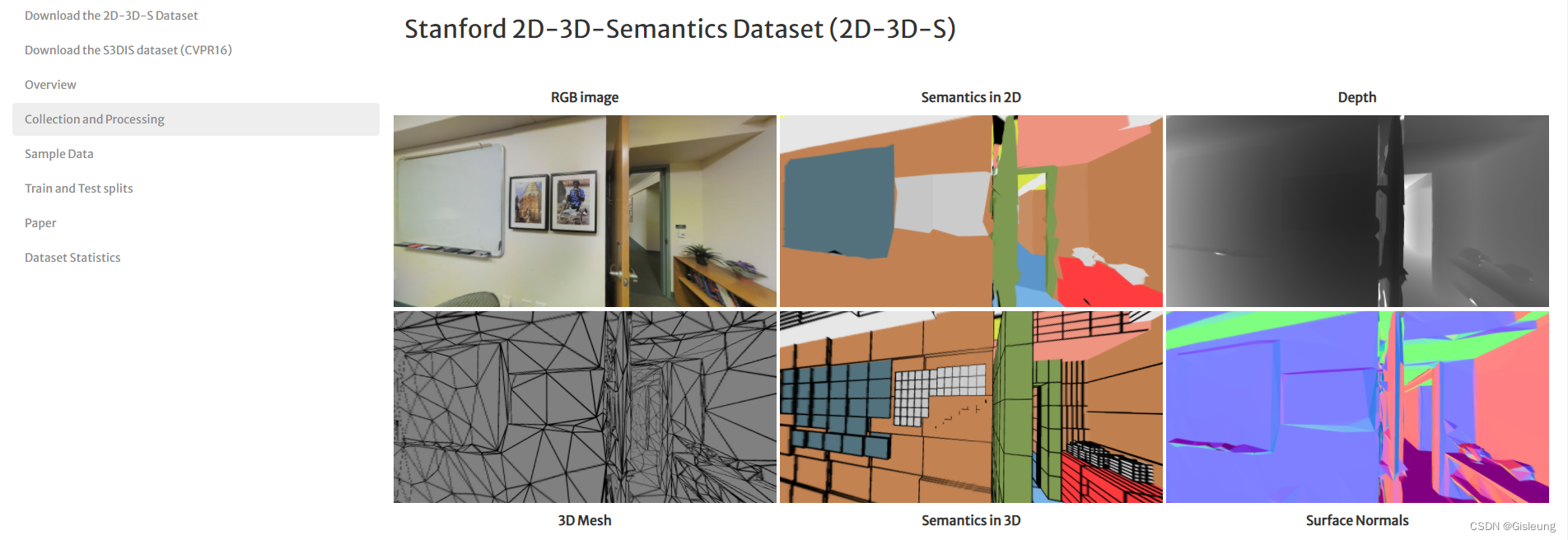
点云公开数据集1 点云分类和分割1.1 ModelNet40 (点云分类)普林斯顿 ModelNet 项目的目标是为计算机视觉、计算机图形学、机器人学和认知科学领域的研究人员提供全面、干净的对象 3D CAD 模型集合。包含数据集:ModelNet40:ModelNet10:modelnet40_ply_hdf5_2048:modelnet40_normal_resampled数据内容: 飞机、汽
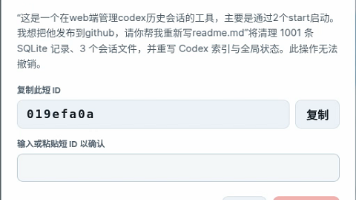
文章摘要:作者开发了Codex History Manager工具,帮助Windows用户集中管理多入口(如Desktop、VS Code、cmd)创建的Codex历史会话。该工具通过网页界面展示会话内容,支持搜索、分组查看和安全删除功能,避免手动删除文件导致的索引残留问题。主要面向不熟悉.codex目录结构的普通用户,提供删除前的二次确认和校验保护。工具仅本地运行,不会上传数据,但建议删除前备份
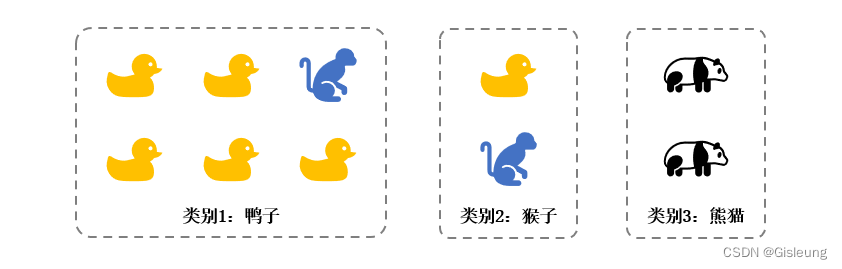
无论是对于图像领域的分类、分割问题,亦或点云领域的物体分类、场景分割,在评价一个模型的好坏时,经常涉及TP、FP、TN、FN、IoU、Accuracy。。。等指标进行衡量,那么这些指标是什么意思呢?我请到了鸭子先生、猴子客人和熊猫管家来给大家亲身示范一下。咦!发现10个可爱的小动物,可是我们不知道是什么动物,要不用深度学习分一下类吧?这个时候我们直接掏出训练好的,把这些小动物丢进去,一番等待之后,
无论是对于图像领域的分类、分割问题,亦或点云领域的物体分类、场景分割,在评价一个模型的好坏时,经常涉及TP、FP、TN、FN、IoU、Accuracy。。。等指标进行衡量,那么这些指标是什么意思呢?我请到了鸭子先生、猴子客人和熊猫管家来给大家亲身示范一下。咦!发现10个可爱的小动物,可是我们不知道是什么动物,要不用深度学习分一下类吧?这个时候我们直接掏出训练好的,把这些小动物丢进去,一番等待之后,
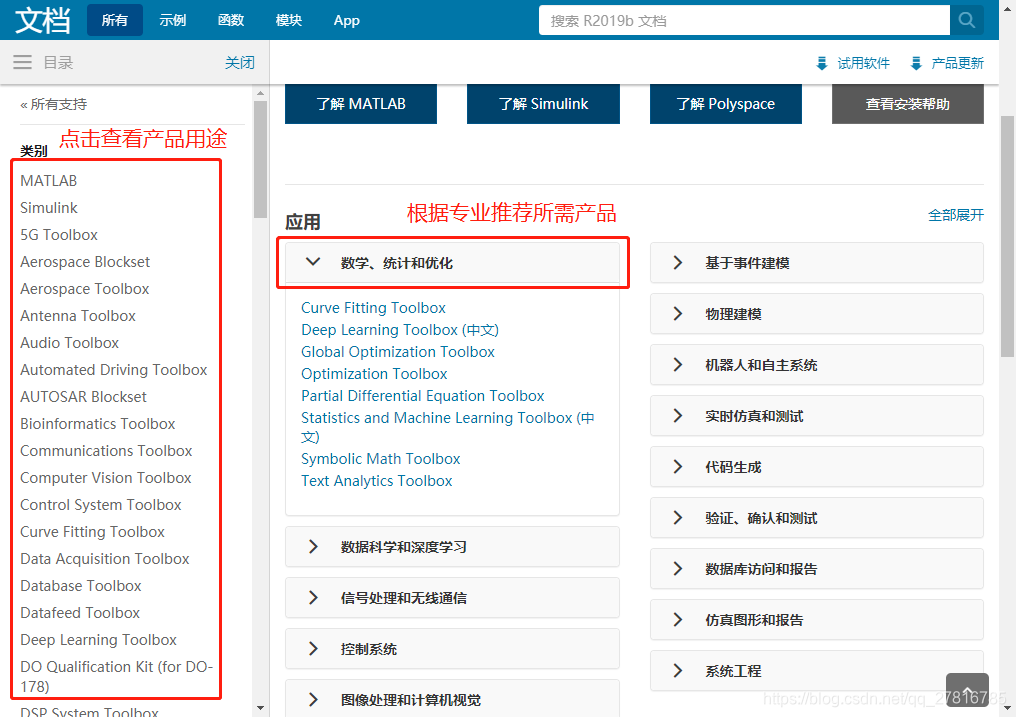
🔥🔥🔥初次安装时不用太刻意选择工具箱,可以在后面使用过程中,按需安装。(注意:需要保留安装包,以备不时之需)不过这种方式在后续使用过程中可能会遇到。,不过都是小问题了啦。
无论是对于图像领域的分类、分割问题,亦或点云领域的物体分类、场景分割,在评价一个模型的好坏时,经常涉及TP、FP、TN、FN、IoU、Accuracy。。。等指标进行衡量,那么这些指标是什么意思呢?我请到了鸭子先生、猴子客人和熊猫管家来给大家亲身示范一下。咦!发现10个可爱的小动物,可是我们不知道是什么动物,要不用深度学习分一下类吧?这个时候我们直接掏出训练好的,把这些小动物丢进去,一番等待之后,
阅前须知:1. 该文章适合采集大量点的高度(异步采集);2. 如果采集单点高度(同步采集),请参考API:scene类下的 sampleHeight 和 clampToHeight,适合采集单点。Scene - Cesium Documentation正文开始主要功能:1. 采集地形高度(地形:viewer.terrainProvider)2. 采集模型高度(3DTile,model,entity
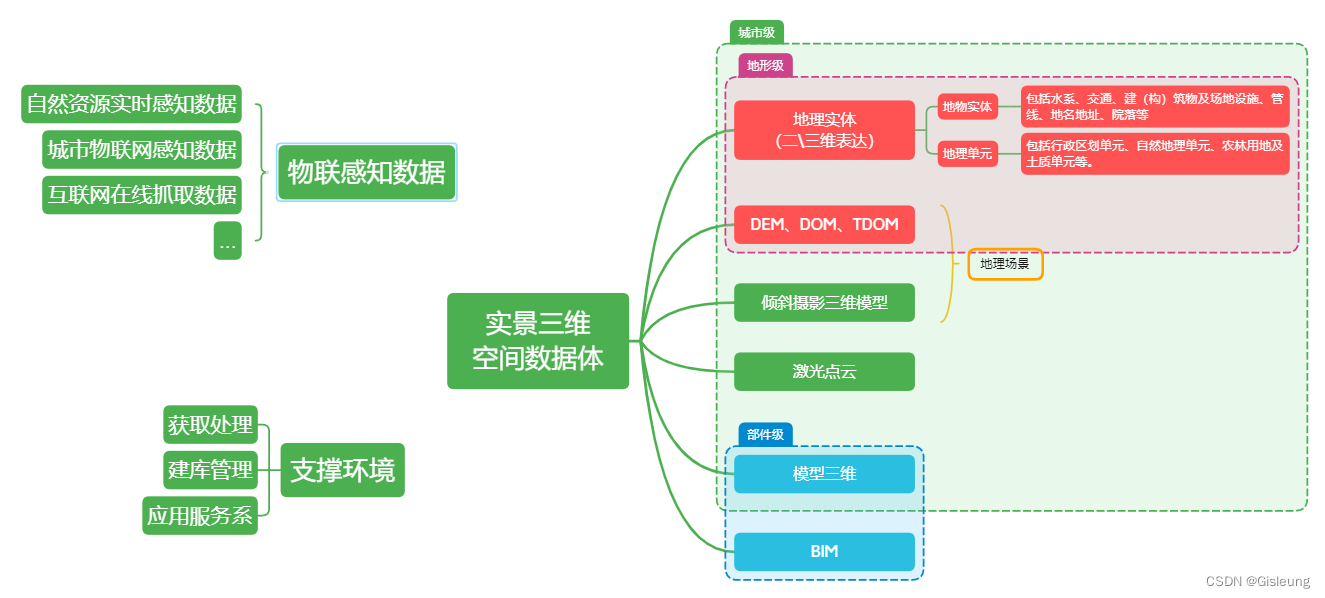
新时期面向基础测绘的新任务和新需求,在保持基础测绘公益性要求前提下,以重新定义基础测绘成果模式作为核心和切入点,带动技术体系、生产组织体系和政策标准体系全面升级转型的基础测绘体系。新型基础测绘是以“地理实体”为视角和对象、按“实体粒度和空间精度”开展测绘、构建“基础地理实体数据库”为目标、按需组装“4E 标准化产品”(组合聚合实体集、无级化地图表达、地形级实景三维、城市级实景三维)的基础性、公益性
🔥Zotero作为一款文献管理软件,支持Windows、MacOs、Linux、IOS等,且可以保持,即在不同的设备和操作系统上(甚至包括网页版)能保持文献、笔记等内容的完全同步选择的另一大原因是该软件 开源!大家都可以贡献优秀的插件,提高文献阅读和管理的效率。另外,非常轻量级,打开特别快。然而,开源软件都有个弊端,需要折腾一下才能变得好用,即需要安装一些插件扩展。(非技术爱好者不建议使用,建议

点云公开数据集1 点云分类和分割1.1 ModelNet40 (点云分类)普林斯顿 ModelNet 项目的目标是为计算机视觉、计算机图形学、机器人学和认知科学领域的研究人员提供全面、干净的对象 3D CAD 模型集合。包含数据集:ModelNet40:ModelNet10:modelnet40_ply_hdf5_2048:modelnet40_normal_resampled数据内容: 飞机、汽