- @oj_geen
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
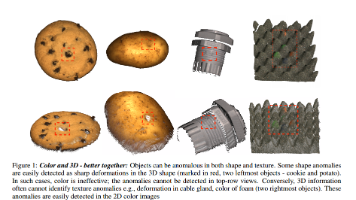
首先,我们有一个惊人的发现:标准的仅基于颜色的方法,在性能上超过了所有当前专为利用三维信息而设计的方法。这看似有悖直觉,因为即便对该数据集进行简单检查,也会发现仅基于颜色的方法,难以处理包含几何异常的图像。这就引出了一个问题:异常检测方法如何才能有效利用三维信息?我们研究了一系列形状表示方法,包括手工设计的和基于深度学习的,发现旋转不变性对性能起着主导作用。我们发现了一种简单的仅基于三维的方法,在
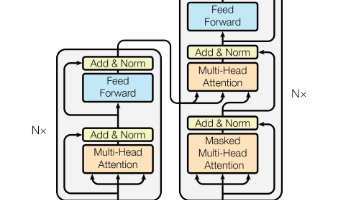
主流的序列转导模型基于复杂的递归或卷积神经网络,包括编码器和解码器。性能最好的模型还通过注意力机制连接编码器和解码器。我们提出了一种全新且简单的网络架构——Transformer,它完全基于注意力机制,彻底摒弃了循环和卷积。在两项机器翻译任务上的实验表明,这些模型在质量上更胜一筹,同时具备出色的并行性,训练耗时也大幅减少。在WMT 2014 英德翻译任务中,我们的模型达到了28.4的BLEU值,超
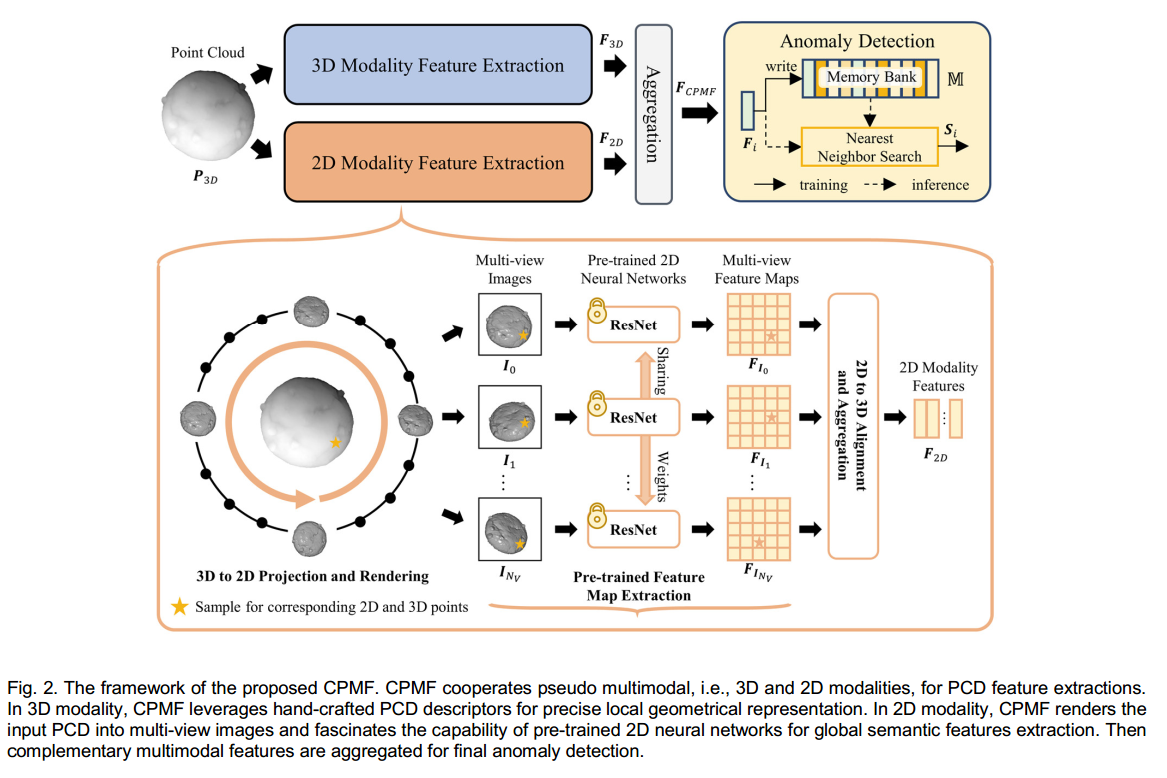
本研究提出了一种名为互补伪多模态特征(CPMF)的方法,用于提升点云异常检测的性能。CPMF通过结合手工制作的点云描述符和预训练的二维神经网络,分别捕捉点云的局部几何信息和全局语义信息。具体而言,CPMF将原始点云投影为多视图图像,利用预训练二维神经网络提取语义特征,并将其与三维模态特征聚合,形成互补的多模态特征。实验结果表明,CPMF在MVTec3D基准测试中取得了显著的成绩,证明了其在点云异常
本文详细介绍了在Linux系统上从源码编译安装Python 3.10.9的完整步骤。首先下载并解压Python源码包,然后配置编译参数并指定安装路径。接着进行源码编译和系统安装,完成后配置环境变量使新安装的Python生效。最后通过版本验证确认安装成功。文中还补充了在Ubuntu/Debian系统上安装Python编译所需依赖包的命令,确保编译过程顺利进行。整个流程涵盖了从下载到验证的全部关键步骤
PyTorch3D提供了3D深度学习的关键功能模块,主要包括:1) ops模块包含核心3D操作,如knn_points点云处理和sample_farthest_points采样;2) loss模块提供3D专用损失函数,如chamfer_distance用于点云匹配;3) 其他重要模块包括renderer渲染和structures数据结构。这些模块共同支持3D数据的处理、计算和优化,为3D深度学习任
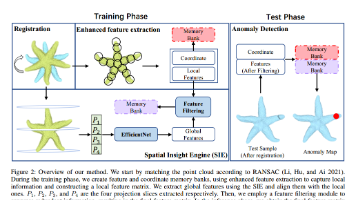
具体而言,我们提出的ISMP包含一个关键的感知模块 —— Proposal Insight Engine(SIE),它可将点云的复杂内部信息抽象为关键全局特征。此外,为了更好地使结构信息与点云数据对齐,我们提出一种增强的关键点特征提取模块,用于放大空间特征表示。同时,融入一种新颖的特征过滤模块,以减少噪声和冗余特征,从而进一步对齐精确的空间结构。
本文详细介绍了在Linux系统上从源码编译安装Python 3.10.9的完整步骤。首先下载并解压Python源码包,然后配置编译参数并指定安装路径。接着进行源码编译和系统安装,完成后配置环境变量使新安装的Python生效。最后通过版本验证确认安装成功。文中还补充了在Ubuntu/Debian系统上安装Python编译所需依赖包的命令,确保编译过程顺利进行。整个流程涵盖了从下载到验证的全部关键步骤
该内容围绕查询翻译中的“后退一步(回溯)”展开,主要介绍了其在RAG流程中的位置、解决问题的不同方法、谷歌提出的后退提示法以及具体实践操作。
以之前视频使用的notebook为例,针对已编入索引的关于代理的博客文章,定义提示“写一篇xxx来回答给定的问题”,用于生成假设文档。
路由的本质是将经过查询翻译后的问题,根据其内容和特征,导向最合适的处理途径或数据源,以实现高效准确的信息检索和处理。