
写文章




- @ohhjack
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ros1仿真导航机器人 hector_mapping gmapping
仅为学习记录和一些自己的思考,不具有参考意义。

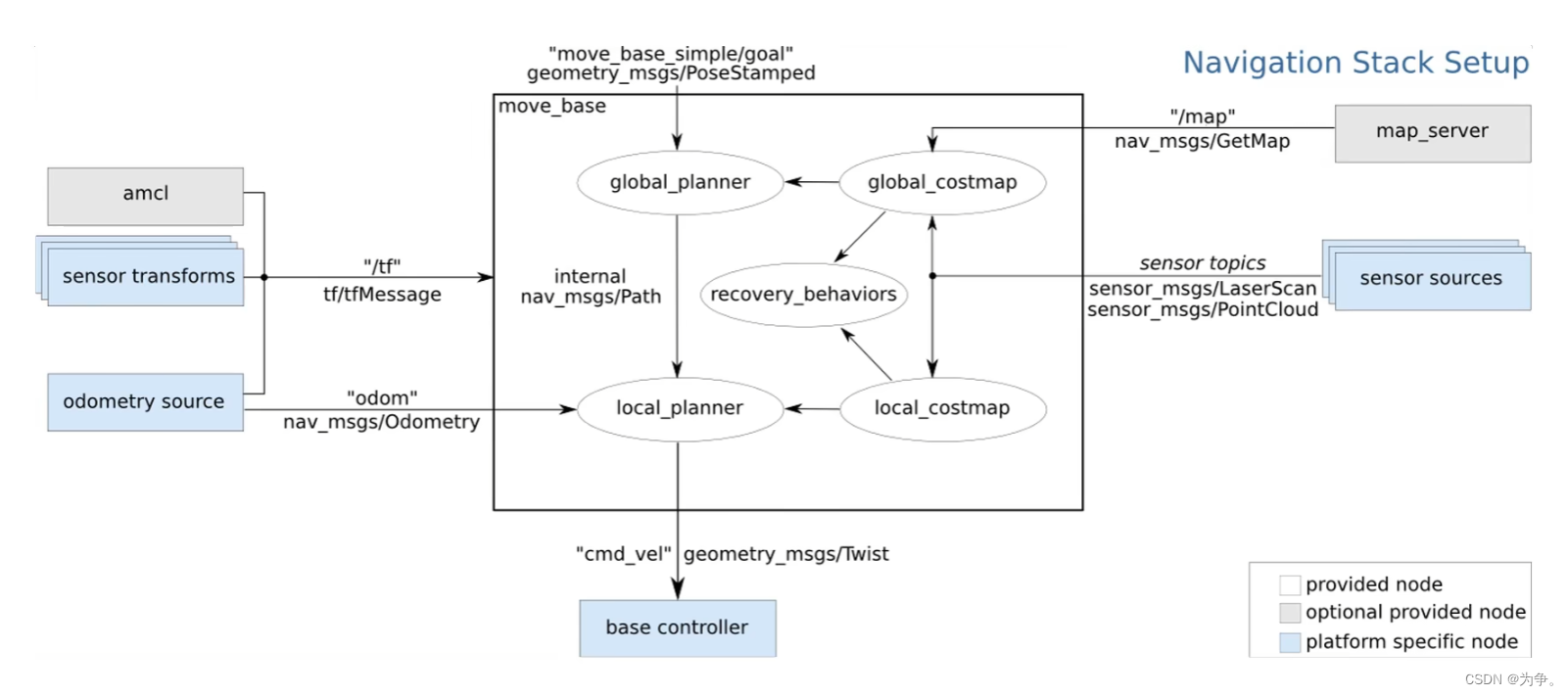
ros1仿真导航机器人 navigation
navfn与global_planner功能相同,同时包含了Dijkstra与A*算法。navfn默认使用Dijkstra算法,算法无问题,但是此包的A*存在问题。global_planner功能包无bug。carrot_planner功能包碰到障碍物就停止了,常作为自己书写的规划器的模板。

matlab控制理论学习
matlab
到底了