- @m0_74295839
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
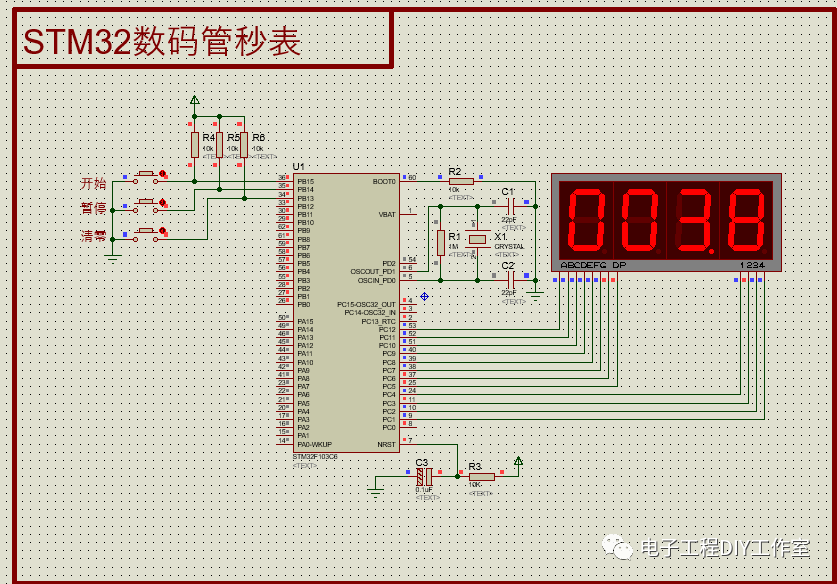
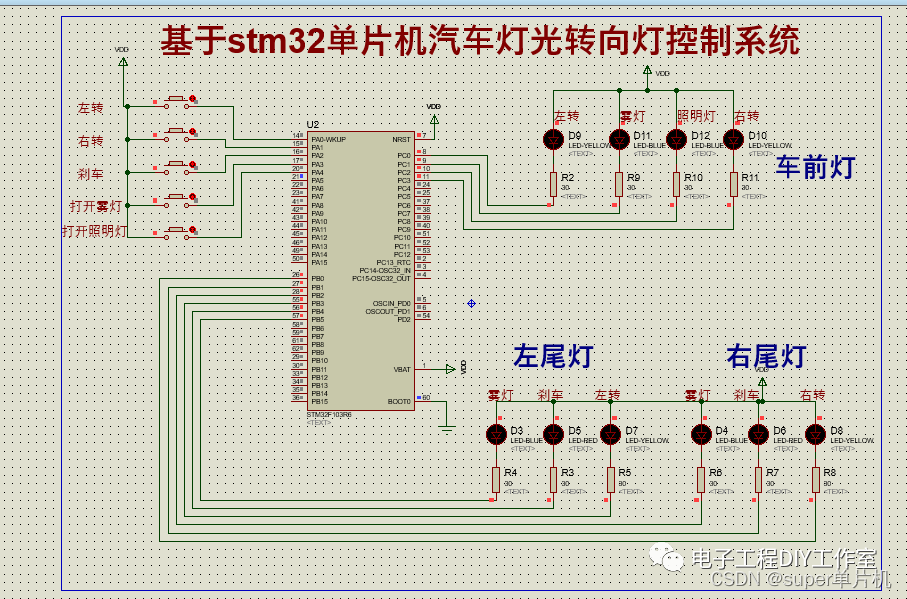
/查询数码管的断码表。//查询数码管的断码表。//查询数码管的断码表。//查询数码管的断码表。//mode =0表示共阳,mode=1表示共阴,可以通过这个修改。case 0://左侧第1位数码管。//如果有对应的按键按下就返回对应按键数值。//所有按键都弹起就清除标志。//m是要显示的数字,比如1.0就是m=10,放大10倍。n=m%100/10;//按键只获取一次按键数值。case 1://左
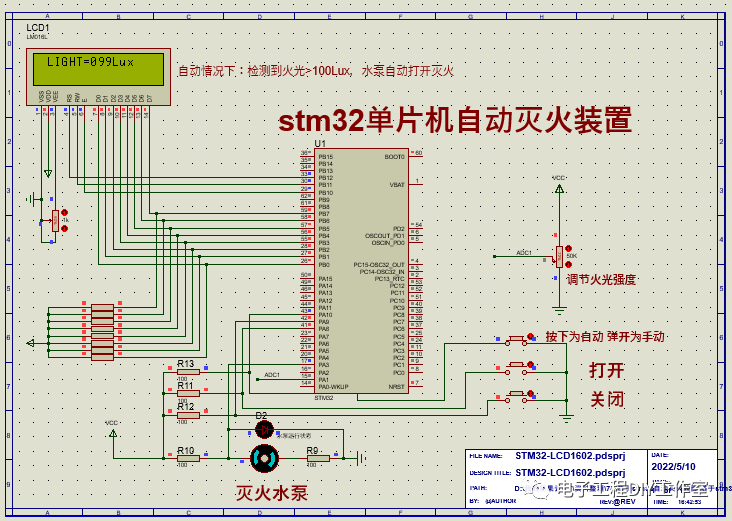
火焰传感器的原理:是通过感知外部特殊波段光照强度的突变来判断是否出现火灾,该仿真采用ADC采集光照强度,发现有火焰情况,自动打开水泵进行灭火,也可以设置为手动模式,进行手动打开\关闭水泵。
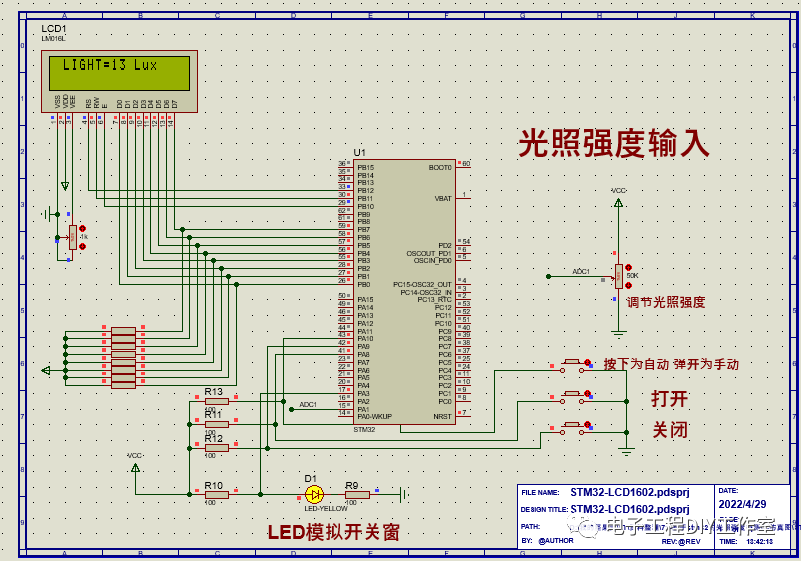
98-基于stm32的光照强度检测智能窗帘系统Proteus仿真(源码+仿真+全套资料)检测当前的光照强度,LCD1602显示,并且可以自动打开关闭窗帘,也可以通过手动按键打开关闭窗帘,全套资料齐全,程序采用C语言,仿真采用Proteus,程序有中文注释,更容易理解;
OSCIN是外部系统时钟输入信号,可以接时钟信号,也可以不接做IO口用,此时stm32用芯片内部的RC电路起振产生时钟信号。
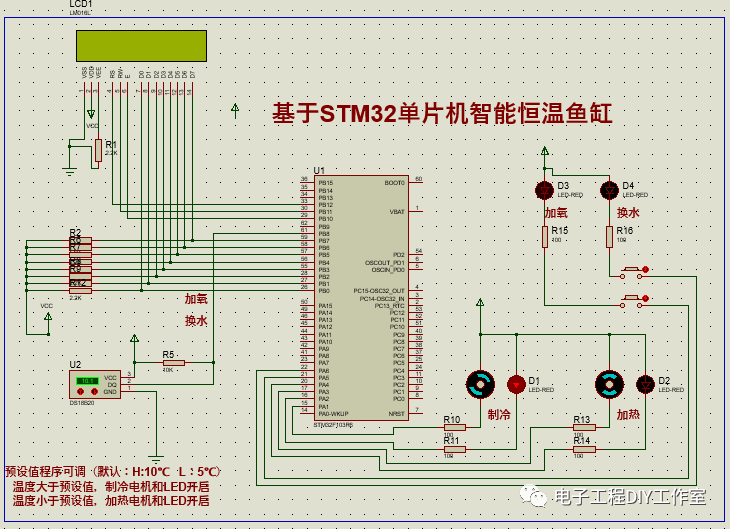
功能讲解:采用stm32单片机,ds18b20测量温度,LCD1602显示温度,可以程序设置温度上下限值,当温度高于上限制,自动制冷,当温度低于最小值,自动加热,使系统保持一个恒温状态,可以通过按键使鱼缸进行加氧和换水的功能。LED_Init();
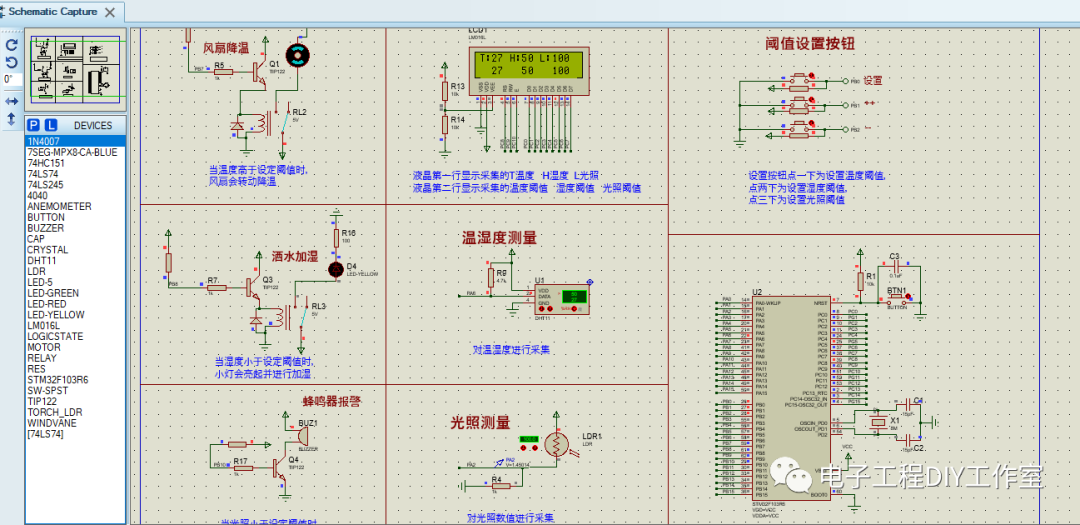
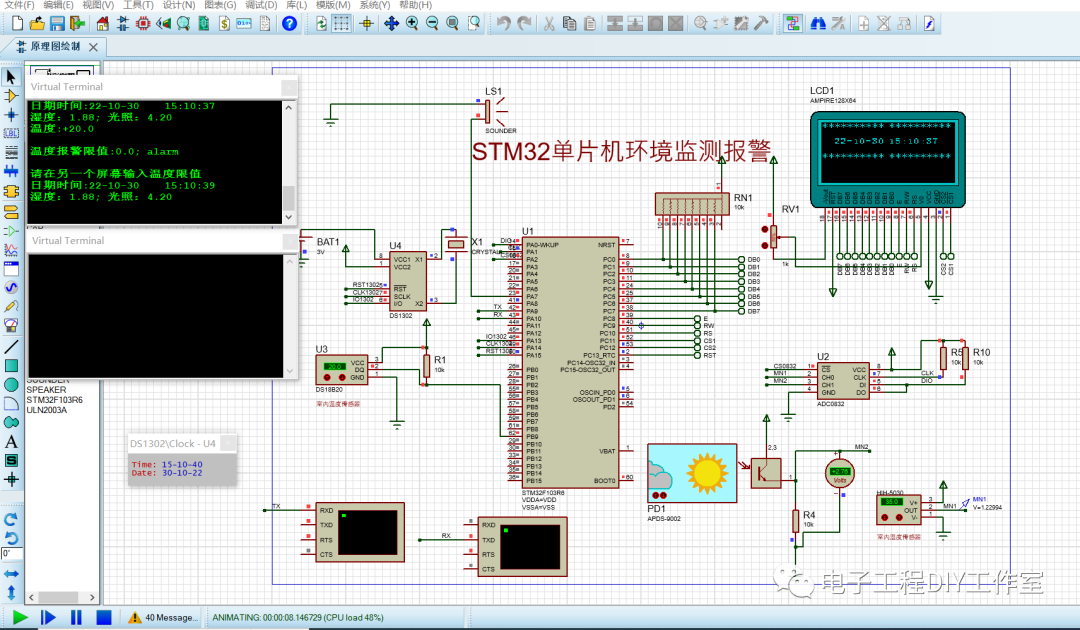
以STM32为最小系统电路进行连接,用液晶显示屏显示温度、湿度和光照数据。用LDR进行光照采集,同时用DHT11温湿度传感器进行温湿度的测量。通过按键可以设置阈值。当光照没有达到设定阈值时,采用BUZZER蜂鸣器报警提醒。当温度达到报警的阈值时,风扇进行转动,由此来达到散热降温的目的。当湿度不足设定的阈值时,洒水加湿装置开始工作。该系统就是采集室内温湿度光照,当不满足要求时自动进行室内温度、湿度和
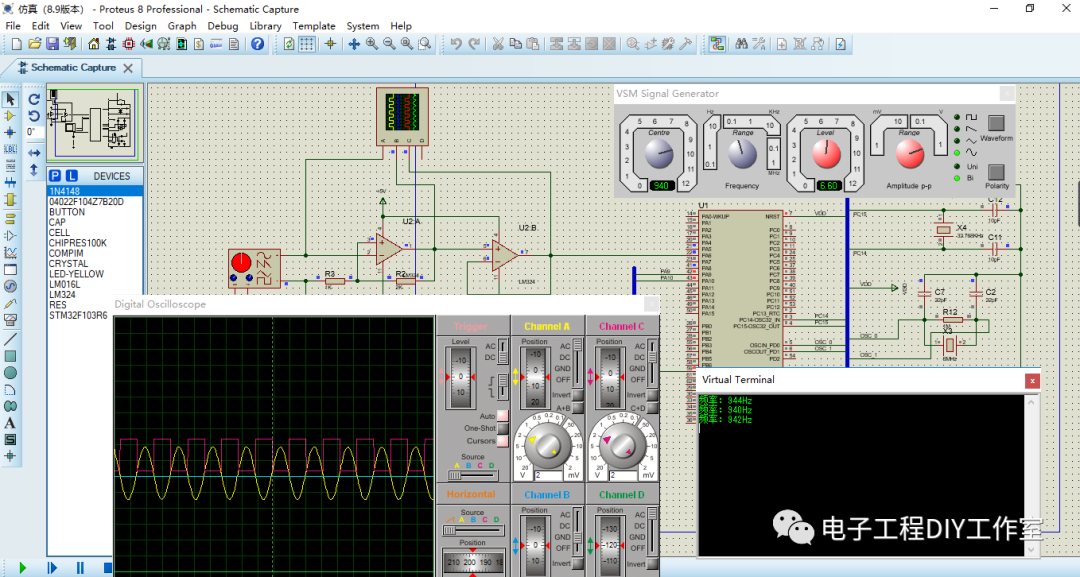
使用Proteus仿真32单片机,实现了可以测量正弦波、方波、正弦波和锯齿波等波形频率的频率计,测量误差在1%以内前端处理电路由LM324运算放大器组成迟滞比较器和电压随器,迟滞特性一定程度上解决了噪声扰动的问题,且可将任意固定频率的信号转化为脉冲,便于单片机的后续处理,而电压跟随器可增强其带载能力。
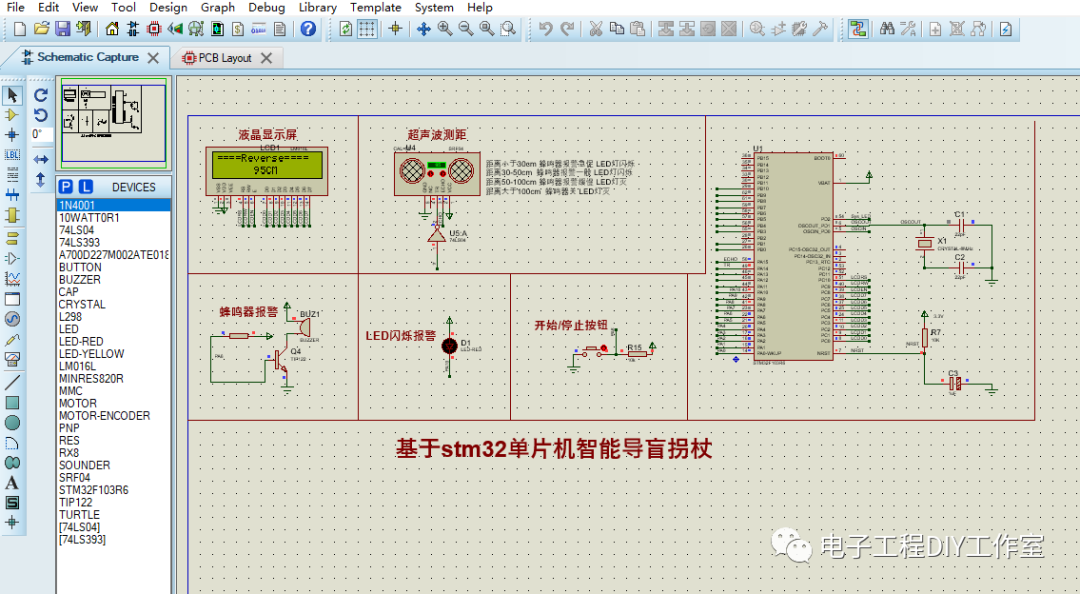
采用stm32单片机作为主控CPU,采用srf05超声波模块测量障碍物距离,LCD1602显示屏显示当前的障碍物距离,通过传感器测量障碍物的距离的远近来进行相关报警,距离越近,蜂鸣器报警节奏越急促,来给盲人提示前面有障碍物,程序采用keil5编写,并且有中文注释,新手容易看懂,仿真采用Proteus,全套仿真资料齐全:下面是视频讲解:
180-基于stm32单片机室内环境温湿度光照强度检测系统Proteus仿真。//返回1:未检测到DS18B20的存在。//从DS18B20读取一个字节。//从DS18B20读取一个位。//等待DS18B20的回应。//返回值:读到的数据。
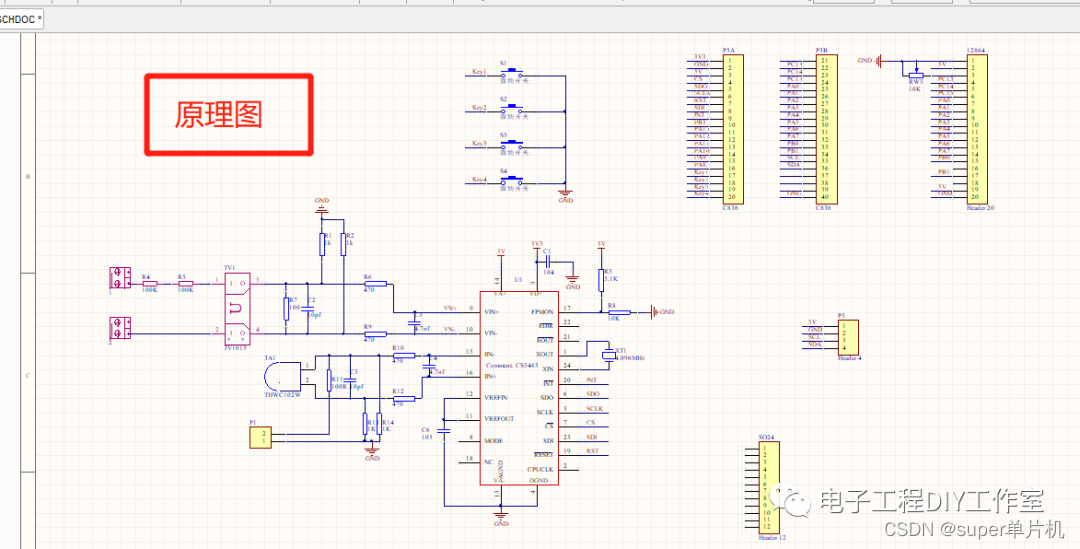
硬件讲解:电参数采集部分结合电压互感器和电流互感器,以专用电能计量芯片CS5463为核心,采集所需电参数,包括电压、电流、功率、功率因数等,MCU采用STM32,进行数据的进一步处理、存储和相关控制功能,其性能强大,功耗低,适合家庭的智能化设备。上图是stm32的晶振电路,8M无源晶振,其中R9(1M)用于稳定晶振的脉冲波形,C8(20P)和C9(20P)一方面构成晶振起振的必要回路,另一方面匹配