
写文章




- @m0_72429709
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
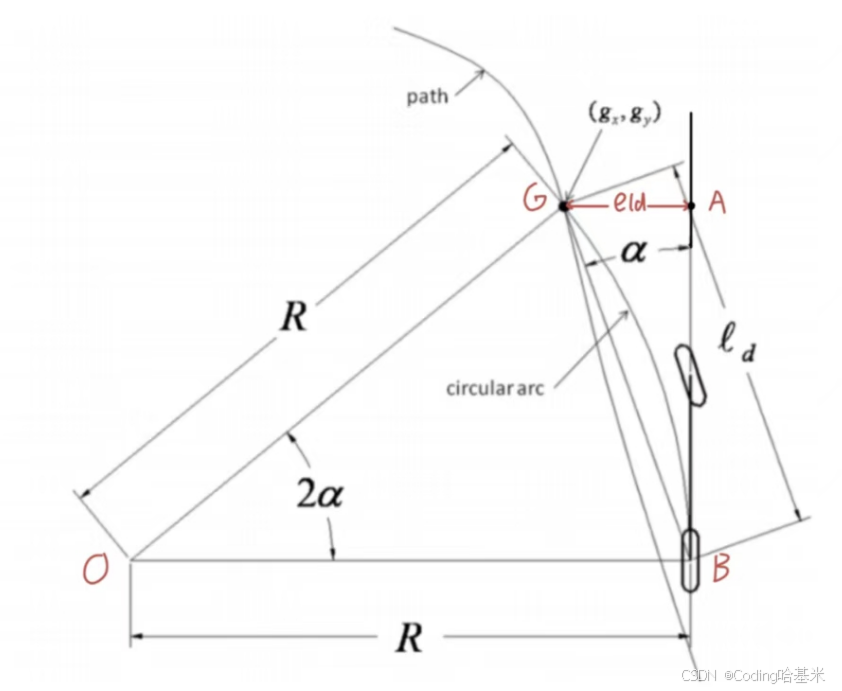
【自动驾驶】基于几何模型的跟踪方法——Pure Pursuit算法
本文主要介绍了基于几何模型的纯跟踪算法:Pure Pursuit
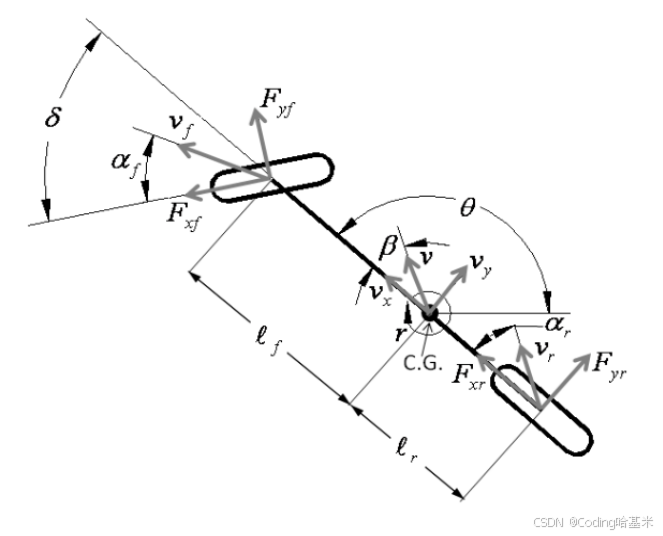
【自动驾驶】车辆横向控制模型——动力学模型
本文介绍了车辆的二自由度动力学模型
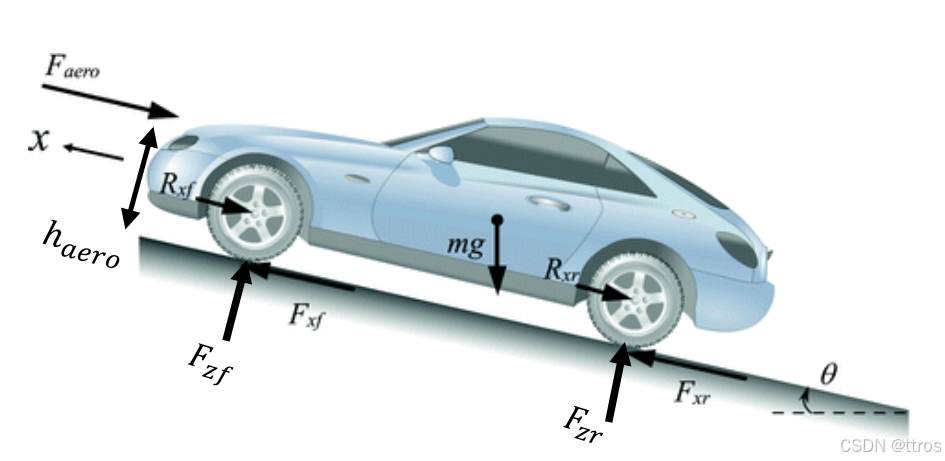
【自动驾驶】车辆纵向控制
本文主要介绍了自动驾驶中的纵向控制模型及PID控制器在巡航控制中的应用
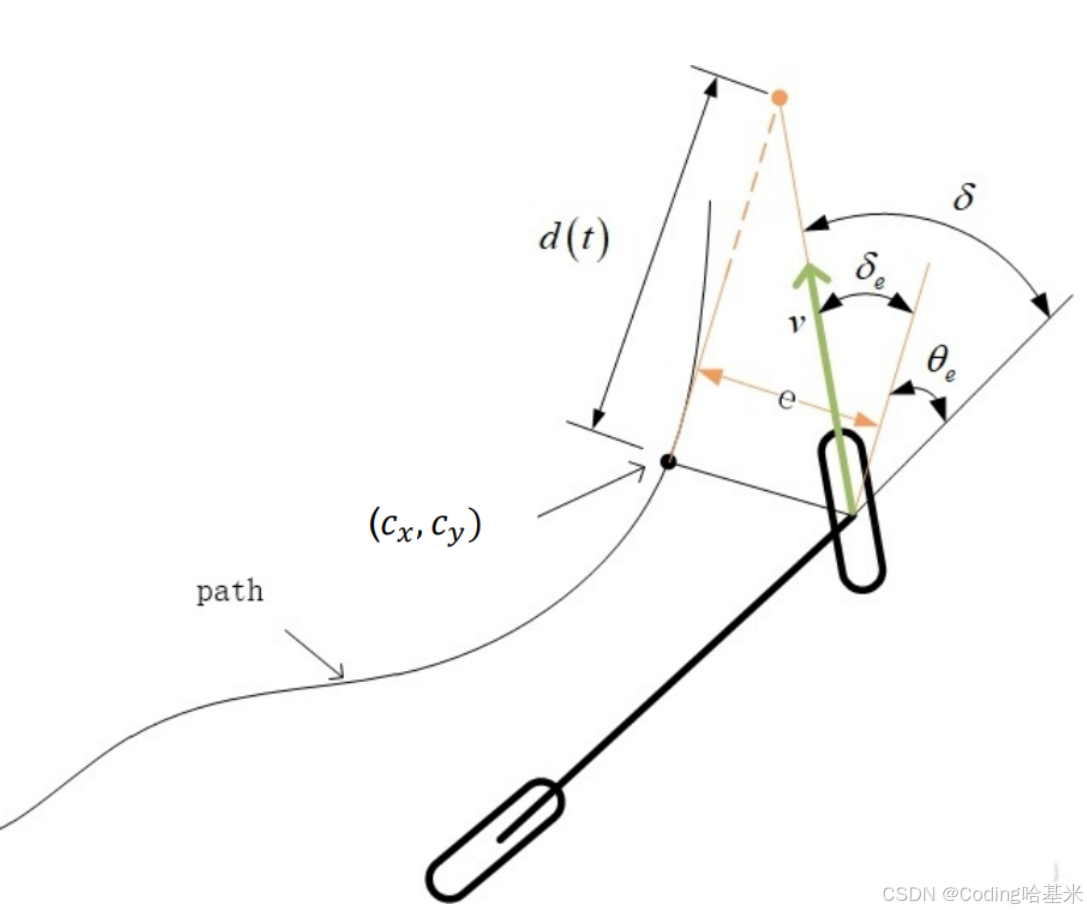
【自动驾驶】基于几何模型的跟踪方法——Stanley算法
本文介绍了自动驾驶中基于几何模型的路径跟踪算法:Stanley算法
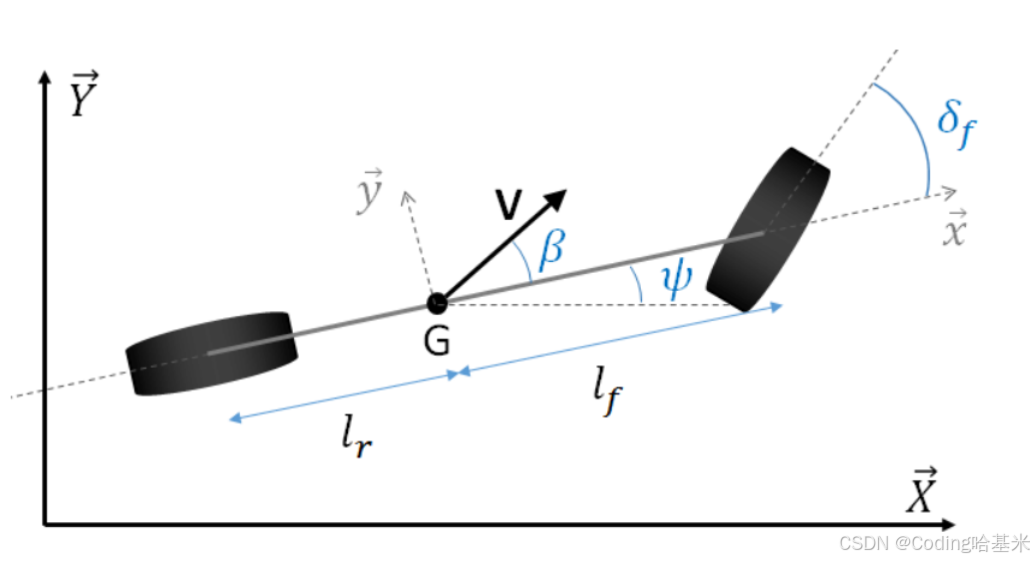
【自动驾驶】车辆横向控制模型——运动学模型
本文主要介绍了自动驾驶横向控制的车辆模型
到底了