
写文章




- @m0_68462260
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
强化学习_A3C算法实现Pendulum-v1
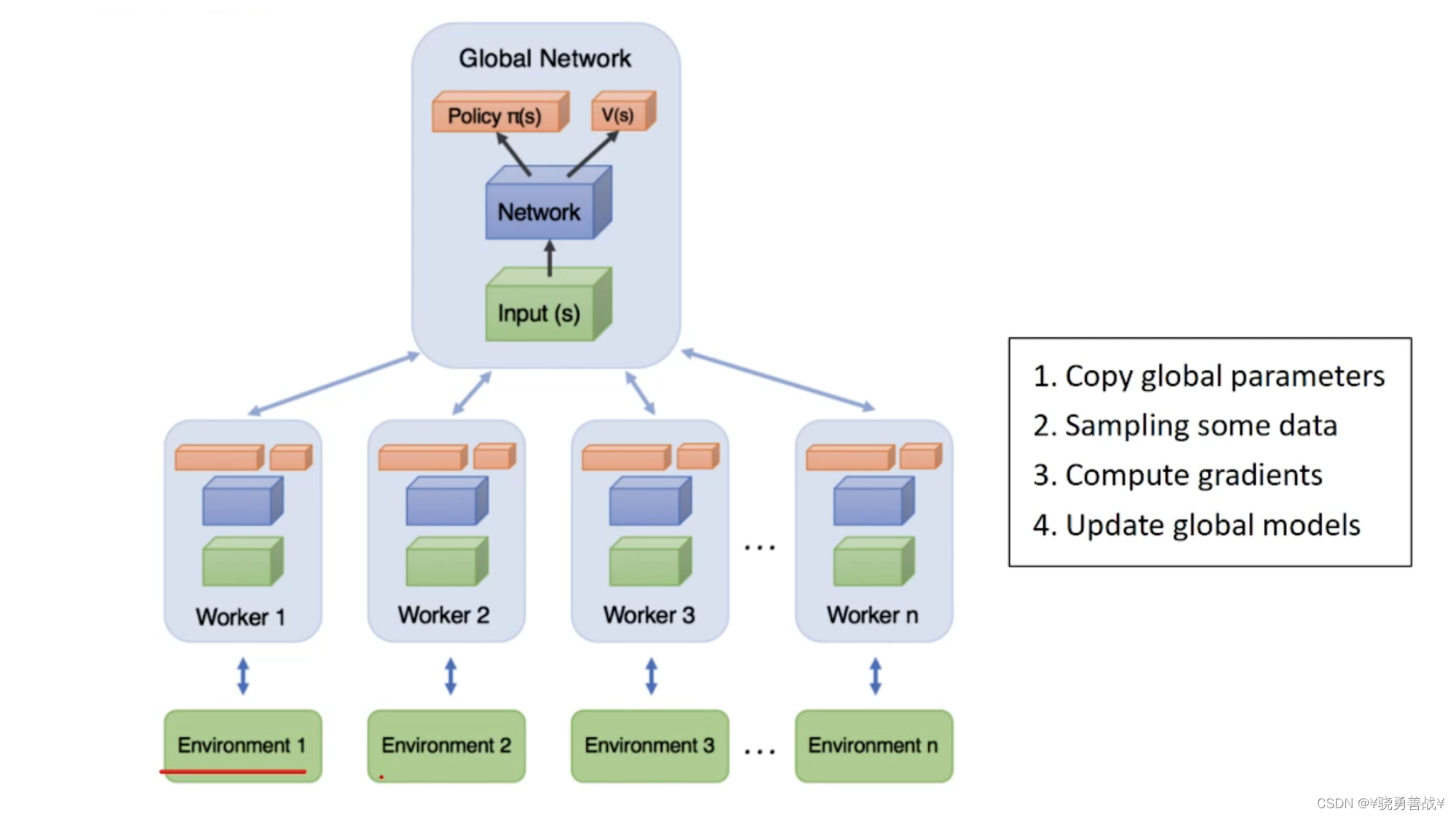
正如我们之前说到,这个“力” 并不是开关,是有大小之别,因此,这是一个连续型控制的问题。我们的任务就调整输入的“力”的大小,让杆子一直树立起来。全局网络 并不直接参加和环境的互动,工人与环境 有直接的互动,并把学习到的东西,汇报给全局网络。互动后,再把梯度提交,获取新的参数…图中的杆围绕A 点转动,我们的任务是,让智能体学会给杆子施加一定的“力”,让杆子立起来。需要强调的是,worker 向全局网
强化学习_A3C算法实现Pendulum-v1
正如我们之前说到,这个“力” 并不是开关,是有大小之别,因此,这是一个连续型控制的问题。我们的任务就调整输入的“力”的大小,让杆子一直树立起来。全局网络 并不直接参加和环境的互动,工人与环境 有直接的互动,并把学习到的东西,汇报给全局网络。互动后,再把梯度提交,获取新的参数…图中的杆围绕A 点转动,我们的任务是,让智能体学会给杆子施加一定的“力”,让杆子立起来。需要强调的是,worker 向全局网
opencv_图像查找和图像拼接
若srcPoints和dstPoints是以像素为单位的,则该参数通常设置在1到10的范围内。请注意,输入掩码矩阵是不需要设置的。:可以简单的理解为它用来描述物体在世界坐标系和像素坐标系之间的位置映射关系。基本的原理是通过特征匹配得到匹配结果, 作为输入, 得到单应性矩阵, 再经过透视变换就能够找到最终的图像。dstPoints: 目标平面中点的坐标矩阵,可以是CV_32FC2类型,也可以是vec
到底了