- @m0_66448749
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
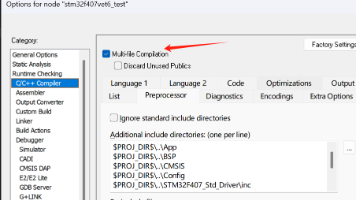
如果你的头文件路径是正确设置的,编译时却没有搜索到你指定的路径,可能是因为没有打开多文件夹编译。
恒幅值变换(系数1/√3≈0.57735)在FOC控制中具有显著优势:1)保持变换前后幅值一致,转矩电流直接对应实际值;2)PID限幅精准匹配逆变器最大线性输出电压;3)物理意义直观,d/q轴参数直接反映励磁/转矩;4)完美适配SVPWM线性输出区,避免波形畸变。相比恒功率变换,恒幅值变换使调试更直观、控制更精准,能充分发挥硬件性能。
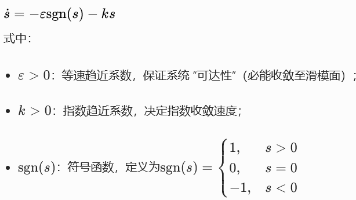
摘要:针对永磁同步电机(PMSM)速度控制中存在的参数扰动和负载干扰问题,提出基于指数趋近律的滑模控制策略。通过构造线性滑模面并设计指数趋近律,有效解决了传统滑模控制收敛速度慢、抖振大的问题。结合李亚普诺夫稳定性理论证明了系统的全局渐近稳定性,推导出PMSM速度环滑模控制律。该算法突破了PI控制对精确模型的依赖,具有快速响应和强鲁棒性特点,适用于高性能伺服驱动和新能源汽车电驱等应用场景。
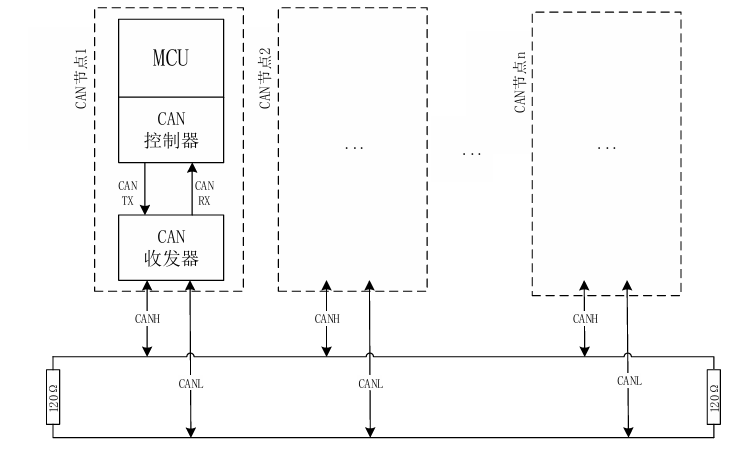
CAN总线技术摘要:CAN2.0协议支持最高1Mbps(40m内)或最长10km(5Kbps以下)的通信,节点数量受通信速率影响。CAN-FD协议通过比特率切换实现更高数据速率(数据段可达64字节),同时保持与CAN2.0的兼容性。总线采用差分线(CANH/CANL)结构,两端需120Ω终端电阻。通信采用非破坏性仲裁机制,通过标识符优先级解决冲突。错误处理包含五种错误类型和三种节点状态(主动/被动
摘要:本文介绍了一种简化的VF(变频变压)控制方法,该方法仅通过控制电源频率和电压来驱动三相异步电机,无需转速或电流反馈,也不采用闭环PI调节。核心原理基于电机同步转速与电源频率的关系,通过计算三相电压幅值并考虑定子电阻压降补偿,生成三相对称电压以产生旋转磁场。该方法适用于风机、水泵、传送带等对控制精度要求不高的三相异步电机应用场景。
摘要:针对永磁同步电机(PMSM)速度控制中存在的参数扰动和负载干扰问题,提出基于指数趋近律的滑模控制策略。通过构造线性滑模面并设计指数趋近律,有效解决了传统滑模控制收敛速度慢、抖振大的问题。结合李亚普诺夫稳定性理论证明了系统的全局渐近稳定性,推导出PMSM速度环滑模控制律。该算法突破了PI控制对精确模型的依赖,具有快速响应和强鲁棒性特点,适用于高性能伺服驱动和新能源汽车电驱等应用场景。
本文针对永磁同步电机(PMSM)矢量控制中传统PI控制器对交流信号跟踪存在稳态误差的问题,提出将内模原理与准谐振(QR)控制器结合应用于电流环控制。通过建立PMSM数学模型,分析PI控制器缺陷,基于内模原理设计准谐振控制器实现无静差跟踪与谐波抑制,并采用双线性变换完成离散化。研究表明,该策略在稳态精度、谐波抑制和频率鲁棒性方面显著优于传统PI控制,适用于高性能PMSM驱动系统。