
写文章




- @m0_60799447
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
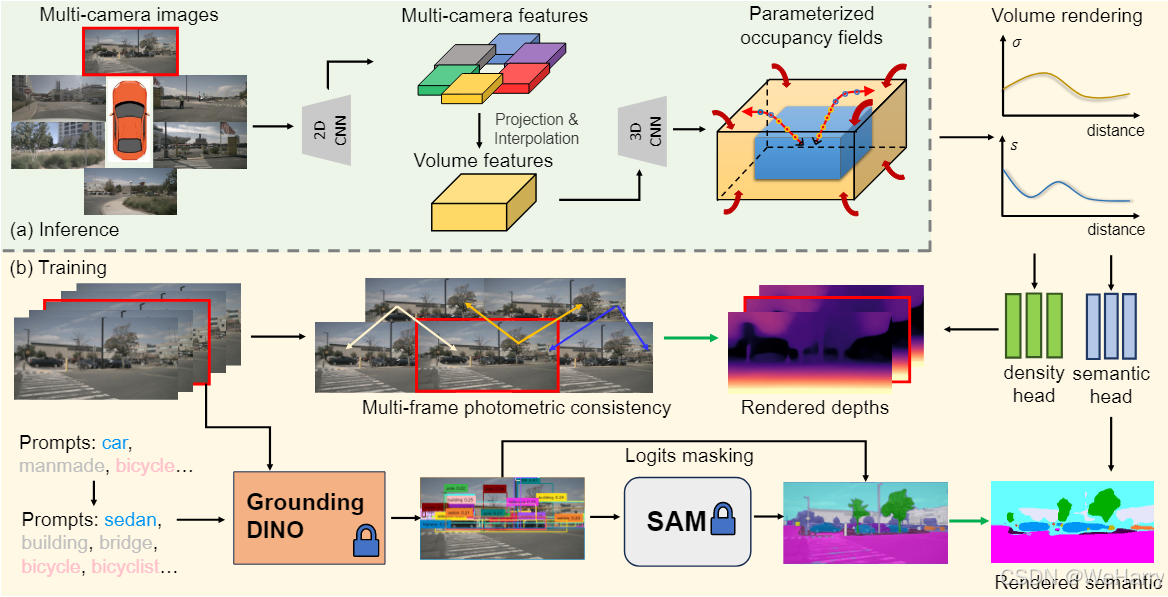
【Rendering-based】OccNeRF: Advancing 3D Occupancy Prediction in LiDAR-Free Environments
研究问题:占据预测(occupancy prediction)是为了重建周围环境的3D结构,常用于自动驾驶中的规划和导航。然而,目前的方法大多依赖于LiDAR点云生成的占据真值(occupancy ground truth),这在基于视觉的系统中不可用。贡献:本文提出了一种名为OccNeRF引入了参数化重建占据场的策略,并重新组织采样方法以适配摄像头的无限视野。使用多帧光度一致性(multi-fr
【论文学习】SegContrast: 3D Point Cloud Feature Representation Learning through Self-supervised Segment Di
论文背景与问题:语义场景解释的重要性在自动驾驶等复杂场景中,语义场景解释是关键技术。当前的深度学习方法在这个任务中表现良好,但对大量的标注数据依赖很大,而这些标注数据难以生成且可能不足以覆盖所有相关类别。自监督学习的潜力自监督表示学习可以通过从未标注数据中学习描述性特征来减少对标注数据的需求。研究目标论文聚焦于三维点云数据的特征表示学习,特别是在自动驾驶背景下。核心贡献:提出了一种新的对比学习方法

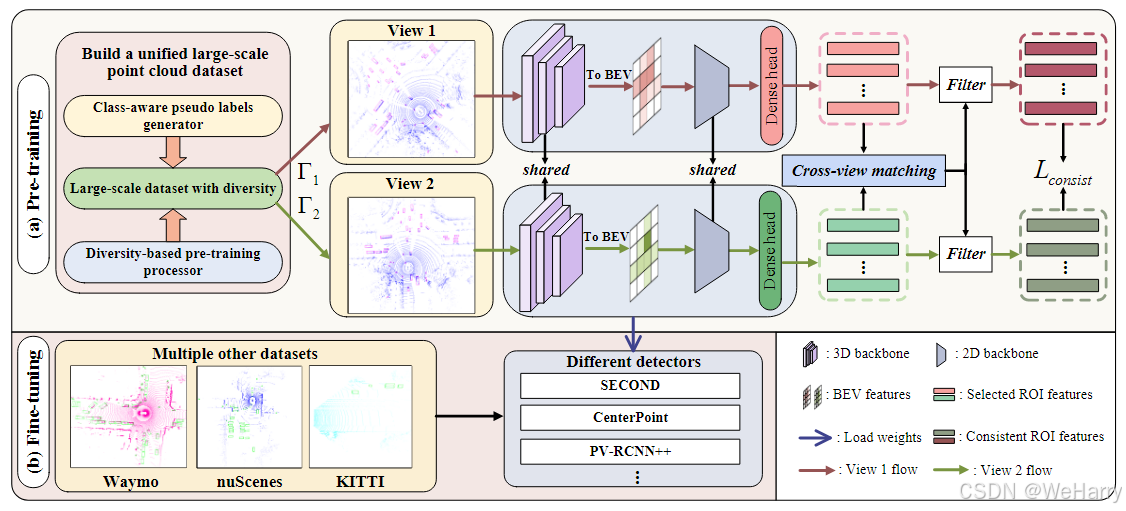
【论文学习】AD-PT: Autonomous Driving Pre-Training with Large-scale Point Cloud Dataset
自动驾驶(Autonomous Driving,AD)社区的长期目标是开发能够从大规模点云数据集中学习的感知模型,以获取可以应用于不同任务和基准测试的统一表示。现有的研究主要集中于自监督预训练,在同一个数据集上进行预训练和微调。然而,这种方法在性能可扩展性和跨数据集应用方面存在局限性。本文提供了一个新的思路来改进自动驾驶感知模型的预训练,增强了模型的跨任务和跨数据集的适应能力。项目相关资源可以在项
到底了