
写文章




- @m0_59601332
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
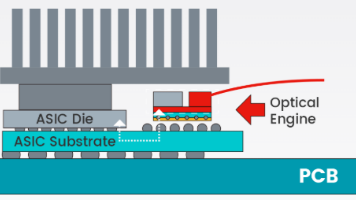
什么是共封装光学(CPO)?关于CPO的架构、优势、挑战与性能
共封装光学(CPO)通过将光引擎与交换机ASIC及AI加速器直接集成,显著降低功耗与延迟。相比传统可插拔模块,CPO将电气路径缩短至毫米级,省去DSP重定时器,实现70%的功耗降低和更高带宽密度。当前技术已支持6.4Tb/s单芯片传输,可构建51.2Tb/s以上交换机。尽管面临散热管理、光纤连接复杂性和标准化等挑战,CPO预计2025-2026年商用,2028-2030年大规模应用于AI集群。博通
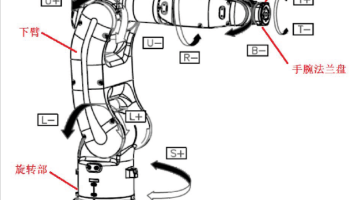
机器人学第三部分——旋转的组合:欧拉角与横滚-俯仰-偏航角 (roll–pitch–yaw)
本文深入探讨了机器人学中的三维空间旋转表示方法。首先分析了旋转矩阵的组合方式,包括当前坐标系视角下的右乘法则和固定坐标系视角下的左乘法则,并通过实例展示了旋转顺序的重要性。随后详细介绍了两种常用的三角度表示法:ZYZ欧拉角(当前坐标系视角)和横滚-俯仰-偏航角(固定坐标系视角),包括其正向计算方法和逆问题求解。文章特别强调了旋转顺序的几何意义,并讨论了两种表示法中的奇异点问题。最后指出旋转矩阵和三
到底了