- @m0_52785249
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
模型的推理速度、参数量等指标计算
文章总结了基于视觉的机器人抓取过程中的三个关键任务:目标定位、目标姿态估计和抓取估计。
基于视觉的机械臂抓取的三个关键任务:目标定位、目标姿态估计和抓取估计目标定位:无分类的目标定位、目标检测和目标实例分割。此任务在输入数据中提供目标对象的区域。目标姿态估计:对6D目标姿态进行估计,包括基于对应的方法、基于模板的方法和基于投票的方法,为已知目标生成抓取姿态。抓取估计:包括二维平面抓取方法和6自由度抓取方法,其中前者被约束为从一个方向抓取。一般抓取方式真实抓取可以通过以上三个任务可以经
文章总结了基于视觉的机器人抓取过程中的三个关键任务:目标定位、目标姿态估计和抓取估计。
1. 坐标系介绍1.1 像素坐标系1.2 图像坐标系1.3 相机坐标系1.4 世界坐标系2. 相机标定2.1 内参2.1.1 内参的意义(透视映射)2.1.2 内参的组成2.2 外参2.2.1 外参的意义(刚体变换)2.2.2 外参的组成3. 标定方法4. 总结...
模型的推理速度、参数量等指标计算
Cornell数据解析
本节主要记录一下在windows安装stable diffusion时,clip脚本安装不上,本地安装时如何链接到当前库的问题上面的问题解决后可能会有git的报错,这时候需要把下载好的git添加在全局环境变量中
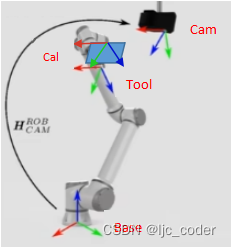
写在前面手眼标定基本分类手眼标定坐标系眼在手外(EYE TO HEAD)眼在手上(EYE IN HEAD)九点法(二维)- 算法实现流程AX=XB方法(二维或三维)- 推导坐标系转换&运算规则齐次坐标系实际坐标系转换公式推导眼在手外眼在手上求解AX=XB方法(二维或三维)- 算法实现流程(总结)源码相关博文......