




- @m0_52376787
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
齿轮轴零件加工工艺、程序编制设计(论文+CAD图纸+实习报告+任务书+工艺卡+工序卡+过程卡+刀具卡片+数控程序)E5艺-CA6140机床后托架加工工艺及夹具设计(论文+DWG图纸+开题报告+任务书+工艺卡+翻译……粉状物料包装机设计(论文+CAD图纸+翻译+开题报告+实习报告+摘要+中期检查表)转速器盘课程设计全套(论文+CAD图纸+工序卡+任务书+指导书+过程卡)五自由度机器人机构设计(论文+
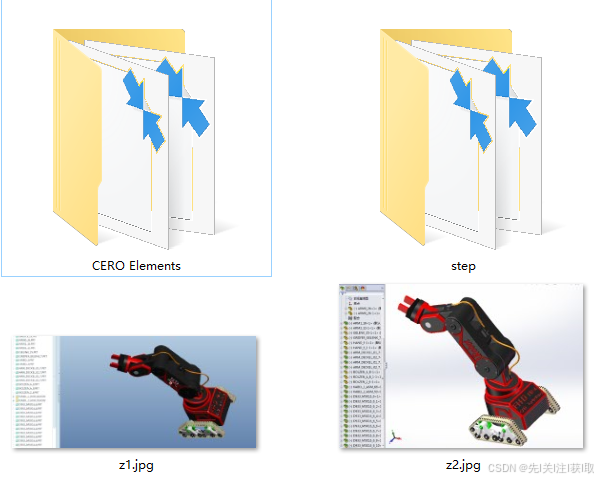
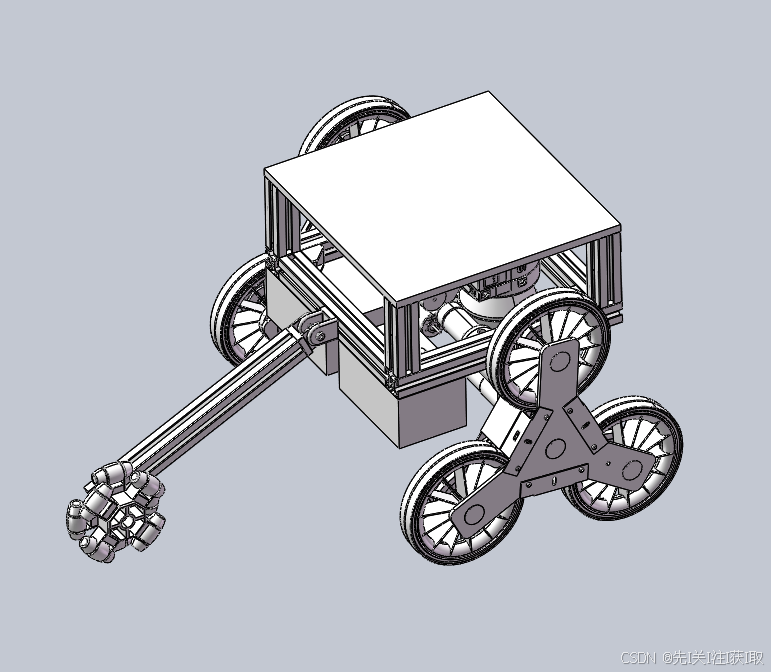
其中爬壁机器人是的应用在检测方面的贡献尤为突出,它的出现可解决国内一些替代人工进行设备维护与检修、设备清表面理与清洗、焊接、除锈等作业任务。与此同时,今日的爬壁机器人机构设计仍存在着一些问题,如:体积大、结构笨重、转向困难、工作环境受限、越障能力不高等。使用UG软件对机械结构方案进行设计,建立起三维装配机构图,详细解读爬壁机器人的机械结构如何运行以及机器人在现实中的装配方式和顺序。当今,机器人已经
具有智能特性的自主式移动机器人正在向非制造业方向扩展,这些非制造业包括航天、海洋、军事、建筑、医疗护理、服务、农林、办公自动化和灾害救护等,如飞行机器人、海难救援机器人、化肥和农药喷撒空中机器人、护理机器人等。移动机械臂用来实现一些动作如抓取,可以在机械臂的末端执行器上安装一定的工具进行作业,通过移动平台的移动来扩大机械臂的工作空间,这种结构使移动机械臂拥有更大的操作空间和高度的运动冗余性,并同时
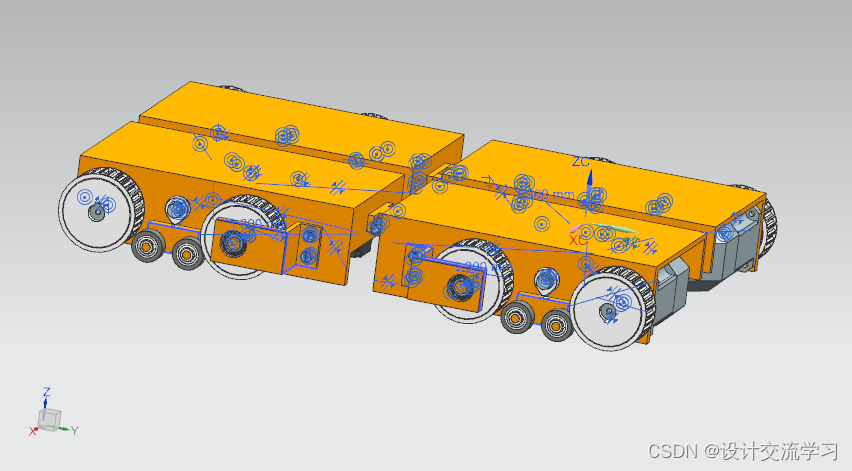
远程控制履带式机器人三维设计图纸是现代工程领域中极具实用价值的学习资料,其核心作用在于为设计者提供直观、立体的结构展示。通过三维模型,可清晰呈现机器人各部件的空间布局与装配关系
葡萄采摘机的设计(说明书+CAD图纸+solidworks三维图+开题报告+任务书+运动仿真视频+答辩PPT……机械手-两足行走机器人——行走结构部分设计(说明书+CAD图纸+三维图+开题报告+任务书+答辩PPT……液压挖掘机正铲工作装置设计(CAD图纸+三维图纸+论文+外文翻译+开题报告+封面+摘要+运动仿真)车床尾座体机械加工工艺与工装设计(论文+CAD图纸+开题报告+翻译+任务书+工序卡+过
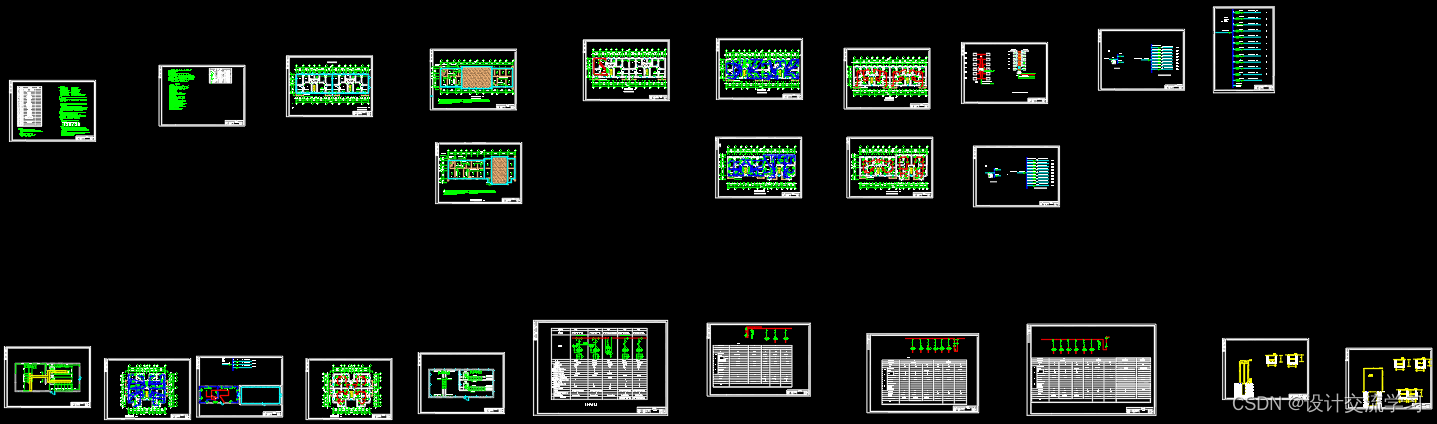
要提高建筑配电系统的可靠性,要正确选择各类配电设备的容量,就必须科学、合理的进行负荷计算。本文对符合计算中的相关问题进行了分析和探讨,就重要设备的容量选择做了较为详细的论述,提出了一些进一步提高配电系统可靠性的措施,并结合工程实例进行负荷计算,计算结果证明本文所述方法是正确合理,可在实际中应用。另外,普通建筑物防雷系统不但不能保护高层建筑物内的电子设备与计算机系统,反而可能会引入雷电。因此,高层建
爬楼梯机器人模型的设计与制作,是机械结构与运动功能结合的典型实践。其核心作用在于通过模拟人体攀爬动作,实现复杂地形下的稳定移动,尤其适用于无电梯建筑、野外救援等场景。
吊篮式清洗机器人,机器人依靠楼顶上的安全吊索牵引移动,利用风机产生的负压使机器人贴附在壁面上以国家大剧院椭球形顶棚清洗为应用背景研制的适用于复杂曲面的自攀爬式机器人样机,由攀爬机构、移动机构、清机器人有许多相似之处,但由于其特殊的工作环境和任务要求,在理论和技术等方面又有一些特殊性。由于爬壁机器人的作业空间一般都较大,带缆作业极大地限制了机器人的作业空间,所以,为了提高机器人的灵活性和扩大工作空间

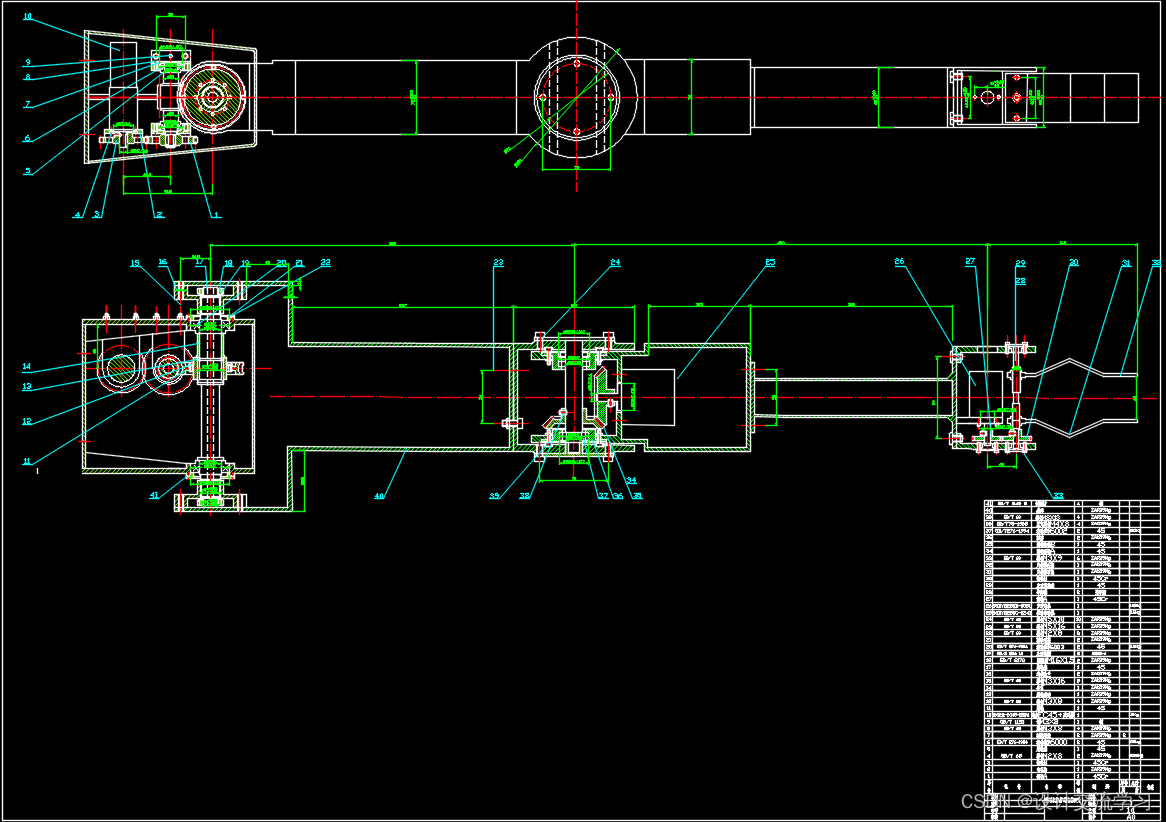
螺旋驱动管道机器人作为特种作业装备,其结构设计需兼顾管道环境适应性、动力传输效率与运动稳定性三大核心需求。该类机器人通过螺旋推进机构将旋转运动转化为轴向位移
某型汽车转向系统设计(说明书+CAD图纸+solidworks三维图+x_t三维格式+开题报告+任务书+答辩+外文翻译)电器旋钮CAD注射模设计(论文+cad图+proe图+开题报告+任务书+实习报告+中期检查表+指导教师评阅表+翻译……电筒筒头注塑模设计(论文+17张CAD图纸+开题报告+任务书+中期检查表+指导教师评阅表+评阅评语表+答辩资格审查表+答。音箱旋钮注塑模设计(论文+CAD图纸+开