- @luofeiju
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
这篇文章深入探讨了相位在信号处理中的核心作用。通过三角函数平移的直观解释,揭示了相位本质上是描述正弦波在时间轴上平移的量。文章巧妙地从实数三角函数过渡到复指数表示,利用欧拉公式将空间域的平移转化为复平面的旋转,展示了相位如何被封装在复数系数中。特别指出在傅里叶变换中,相位信息决定了信号的几何结构,而振幅仅决定能量分布。最后延伸到非周期信号的傅里叶变换,强调相位线性与时延的关系,以及非线性相位导致的
结构体 MatchesInfo 包含了所有图像之间进行两两匹配的相关结构,Mat H 记录了两幅图像间的仿射变换矩阵,该矩阵是全景图像拼接的基础信息,特征点间匹配信息记录在 pairwise_mathes 中。首先将第 i 张图像上特征点映射到三维空间,然后再将三维空间点映射到第 j 张图像中,注意,两次映射使用了不同的映射矩阵!以上代码首先估计相机焦距,在 “全景图像拼接” 一文中,给出了根据仿
一个3*4的矩阵包含了12个元素,由于一组各元素比值相同的变换对应一个齐次变换,因此该矩阵正好包含了11个自由度,主平面是经过相机中心且平行于像平面的平面(XY平面),很显然该平面上任意点都投影到像平面的无穷远点,2)已知图像上点x,根据相机模型,无法确定一个唯一的三维点,但可以确定一条经过相机中心到无穷远点的射线,矩阵K表达了相机相关属性,为相机内参,矩阵R,C表达了世界坐标系与相机坐标之间的关
引入one-hot编码 0:[1,0,...,0],1:[0,1,...,0],2:[0,0,1,...,0],... ,9:[0,...,0,1]4)第二个卷积层维度为[b, 16, 10, 10],因为没有使用padding操作,卷积后图像尺寸会变小,这里卷积核尺寸为5*5;2)第一个卷积层维度为[b,6, 28,28],因为没有使用padding操作,卷积后图像尺寸会变小,这里卷积核尺寸为5
摘要: OpenCV提供轮廓检测与处理功能,cv::findContours()用于提取图像轮廓,支持多种提取模式(如树形结构、层级关系)和压缩方法。轮廓数据使用STL容器存储,通过cv::drawContours()绘制。轮廓操作包括多边形近似(cv::approxPolyDP())、计算长度/面积、拟合几何形状(矩形、圆、椭圆)、凸包检测等。参数如mode和method控制提取方式和精度,而o
本文系统介绍了图像阈值分割技术,重点分析了二分类阈值方法(固定阈值、P-Tile、迭代阈值和Otsu大津法)及其数学原理。针对实际应用中的光照不均、噪声干扰等问题,提出了结合平滑、直方图均衡化等改进策略。文章还详细探讨了自适应阈值技术,并提供了完整的C++/OpenCV实现代码。通过理论分析与实践结合,全面解析了如何在不同场景下选择最优分割策略,为计算机视觉任务提供了实用的阈值分割解决方案。
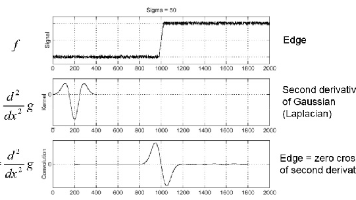
本文系统介绍了基于Laplace算子的图像处理方法。首先阐述了Laplace算子通过二阶微分检测边缘的原理,并说明了LoG算子(高斯-拉普拉斯)在降噪后的优势。进而介绍了DoG算子作为LoG的高效近似方法。重点讨论了多尺度归一化LoG/DoG在Blob检测中的应用,包括特征点形状描述和旋转归一化处理。最后提供了OpenCV在Python和C++中的实现示例。这些方法为SIFT等高级特征检测算法奠定
在OpenCV中,使用 cv::goodFeaturesToTrack 提取角点,在精确度要求较高时,可使用 cv::CornerSubPix 对提取到的角点计算亚像素精度,该算法基本思想是边缘上点与角点的连线垂直于边缘上点梯度方向;根据假设3),由于被追踪点邻域运动一致,对邻域点做相同计算,并建立其联立方程组,即可求解被追踪点的运动速度。,则得到一个椭圆平面,其长轴表示变化最快方向,其短轴表示变
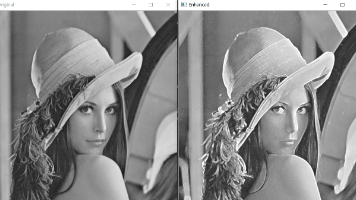
本文介绍了OpenCV中三种核心图像处理函数:cv::convertTo()用于数据类型转换和线性缩放,cv::normalize()实现数据归一化,cv::scaleAdd()执行加权叠加运算。通过具体示例演示了从图像读取到增强处理的完整流程,包括灰度转换、Sobel边缘检测、归一化处理以及最终加权融合输出。这些函数组合使用能有效实现图像对比度增强、特征融合等常见任务,为计算机视觉应用提供基础技