- @learun7
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
手机云控系统框架源码,PHP+Autojs,源头作者,脚本定制等,这套是空框架源码,适合任何云控的二次开发,通信协议为ws+http最近在研究手机云控系统,发现了一套超有趣的框架源码,基于 PHP + Auto.js 构建,简直是二次开发的宝藏!
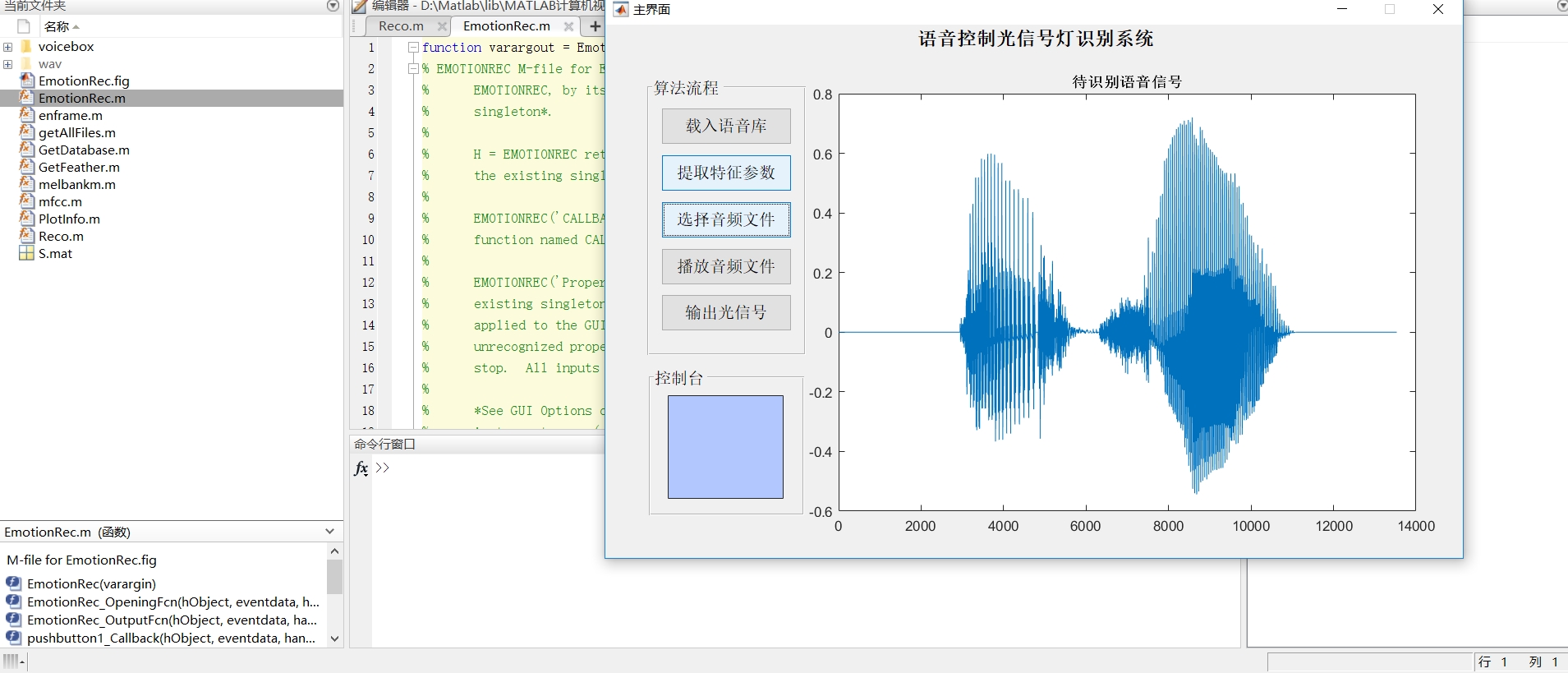
这个简陋的GUI界面虽然比不上真实信号灯,但当第一次用"绿灯"口令真的点亮绿色圆圈时,还是能感受到代码与物理世界联动的奇妙。就像我们接电话时能自动忽略背景的键盘声,端点检测就是给语音信号划重点的技术。端点检测是指在语音信号中查找各种段落(如音素、音节、词素)的始点和终点的位置,并从语音信号中消除无声段,进而实现对语音有效信号段的截取。过零率像在数语音信号穿越零点的次数,浊音段的过零率通常比清音低。
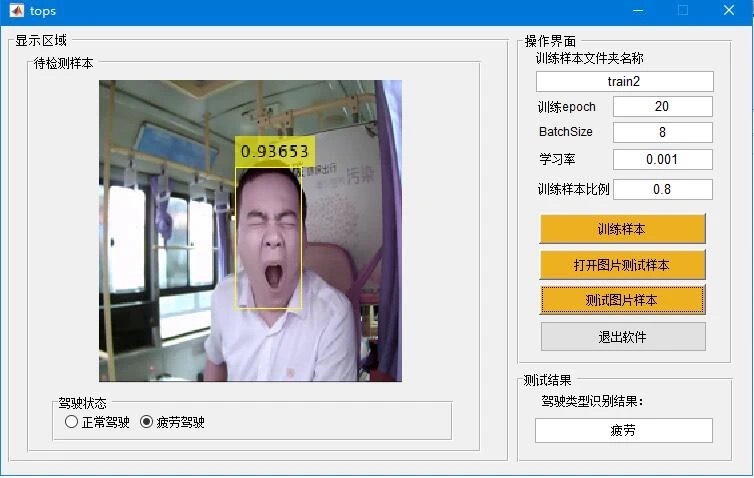
这里用了最简单的缩放,但实际效果可能打折。整个项目跑起来后,最带感的还是看到仪表盘的红灯突然亮起,配合警报声——这效果拿去参加大学生创新竞赛绝对够用。这段代码看着简单是吧?比如YOLOv2检测到多个面部框时,咱们直接取第一个(bboxes(1,:)),实际场景可能需要加个置信度过滤,不然突然检测到个幽灵框就翻车了。但要注意timer对象的内存泄漏问题,见过不少人忘记写stop后释放资源的,程序跑着
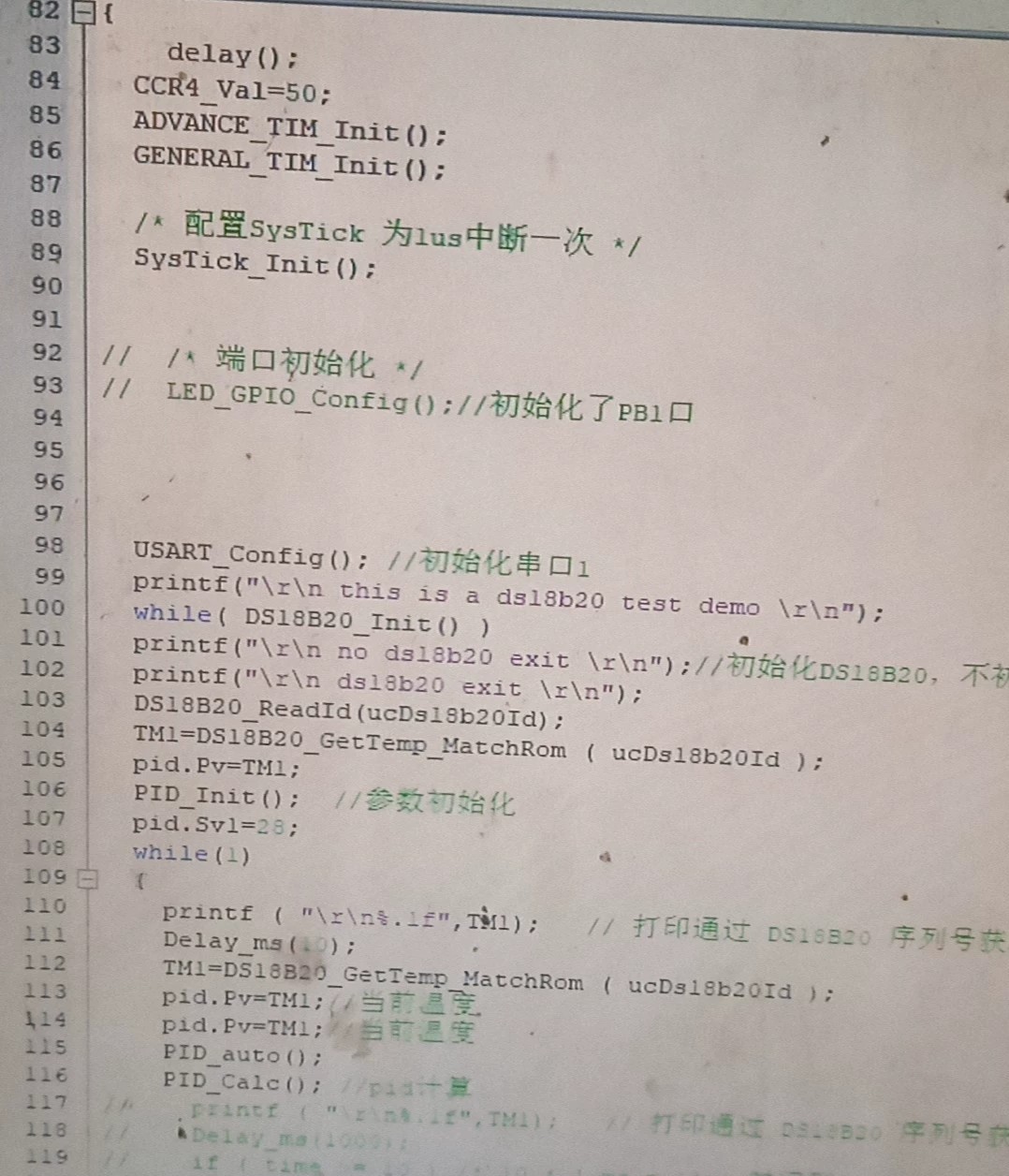
咱们今天拿STM32F103开刀,手把手整出个带参数自整定的智能温控系统,重点聊聊怎么让单片机自己找合适的PID参数。完整工程里还埋了个彩蛋——用FFT分析温度波动曲线,自动优化控制参数,这就不展开说了,源码注释里写得明明白白。注意TIM_CtrlPWMOutputs这个函数,用高级定时器时必须开启主输出,否则PWM没信号,这个坑我当年踩过。采用反馈法进行PID参数自动整定,得出系统临界值比例增益
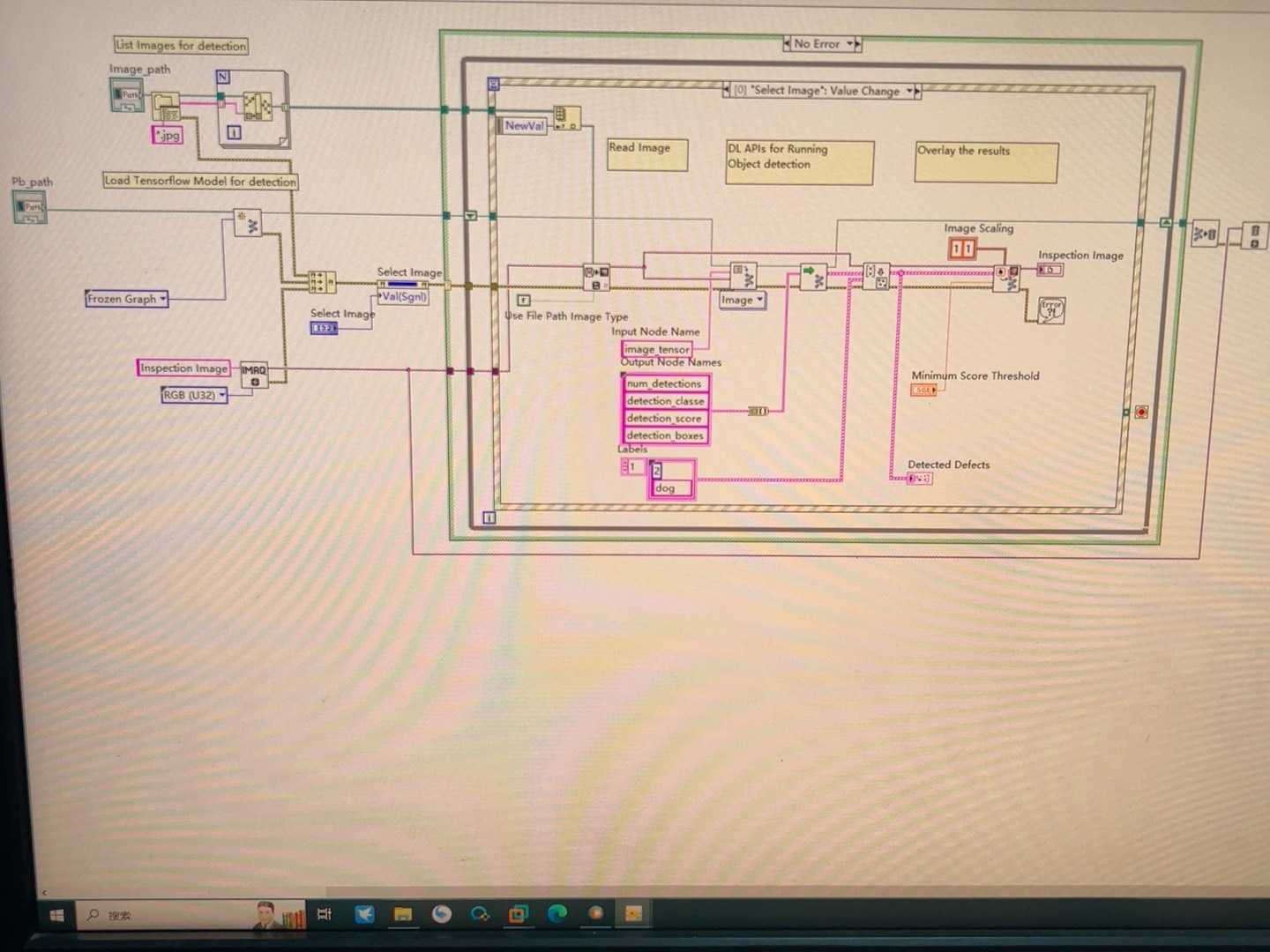
想着能不能把之前用Python训好的TensorFlow模型直接塞进LabVIEW里用,结果踩了三天坑终于跑通了,顺手整理个野路子教程。最后上个效果图:用LabVIEW控制USB摄像头采集图像,实时调用YOLO模型做目标检测,FPS能跑到25左右。核心操作就是把训练好的模型导出成.pb格式,然后用LabVIEW的Python节点调库预测。前端用LabVIEW的JSON工具包处理数据打包,实测720
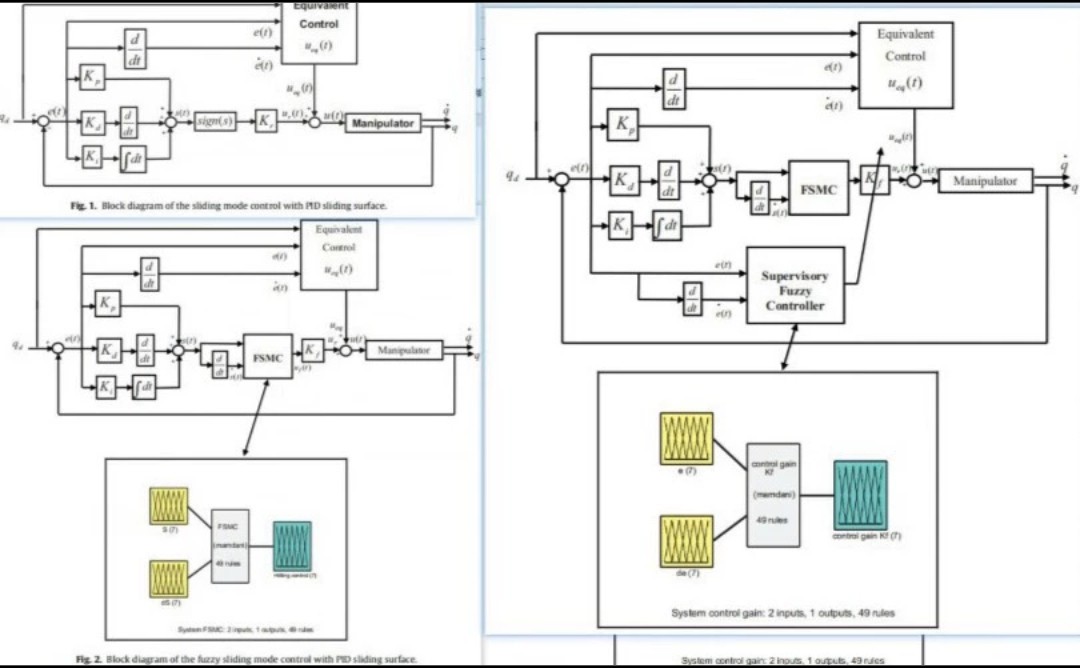
代码层面上看,PID的实现量不到20行,滑模大概30行,而模糊滑模加上模糊规则库后飙到80行。但要说抗干扰能力,在给机械臂突然加上5kg负载时,PID的跟踪误差直接破10度,滑模维持在2度左右但抖得厉害,模糊滑模则把误差压在1.5度还没明显抖动。实际测试时发现,当跟踪误差突然增大,模糊规则会自动增强控制力度,有点像老司机遇到突发状况时的那脚精准刹车。MATLAB机械臂自适应模糊滑模控制代码,机器人
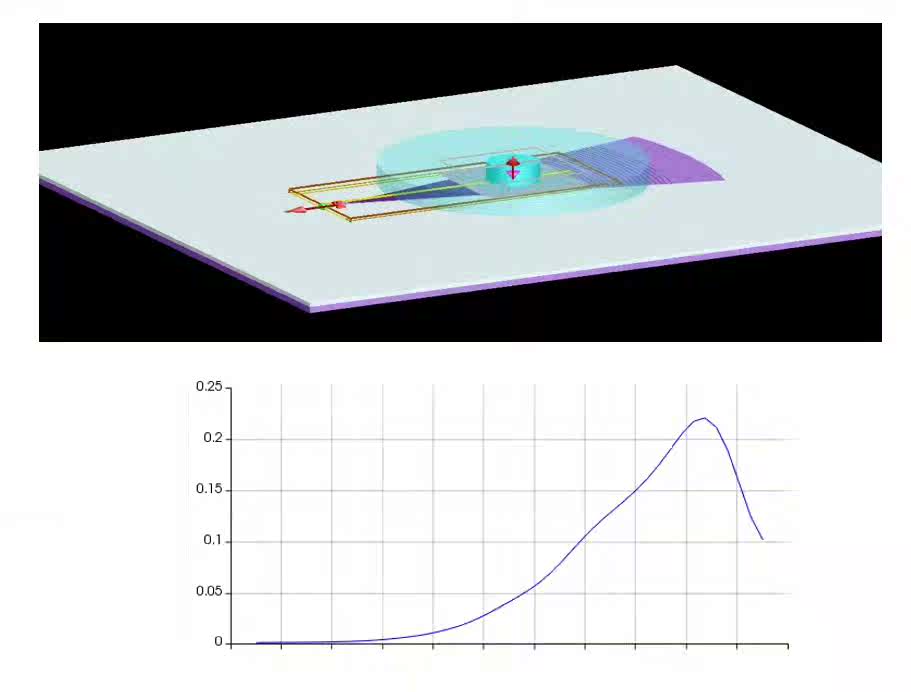
最近在折腾光栅耦合器的仿真,发现转换效率计算这块儿总是容易踩坑。今天咱们就手把手撸个简易版FDTD(有限差分时域法)流程,重点看看怎么从时域数据里把转换效率榨出来。特别是当看到光脉冲在光栅齿间反复横跳,最后乖乖钻进波导时——这酸爽,谁试谁知道。这里有个坑要注意:FFT后的频谱是复数,直接取模平方才是功率。有次我忘记取模,算出来效率超过100%,当场表演牛顿的棺材板按不住。见过最狠的案例是:有人把网
这套高频注入启动与观测器平滑切换的无感FOC方案,代表了当前嵌入式电机控制领域的一种成熟且高效的工程实践。它不仅提供了从理论到落地的完整解决方案,其清晰的架构和优秀的可移植性,也为广大开发者提供了一个极佳的学习和二次开发平台。对于追求高性能、高可靠性和低成本的PMSM驱动应用,此方案无疑是一个极具价值的技术选择。
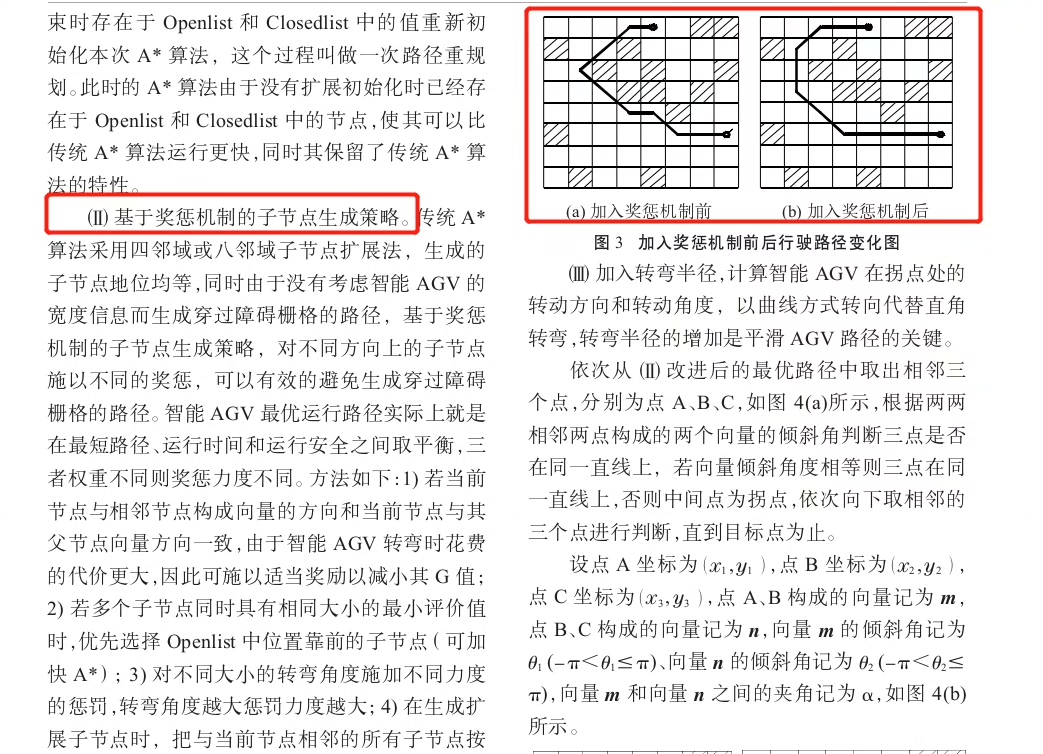
多目标点移动机器人改进路径规划算法代码送餐机器人,AGV室内机器人仿真路径规划采用改进A*算法融合模拟退火算法,规划多目标点路径规划。解决路径与障碍物相撞,AGV不斜穿室内区间,采用水平垂直方向移动路径规划,圆弧转弯。室内旅行商问题——送餐移动机器人(从厨房出发到达多个目标点,最后返回厨房)1,改进A*算法规划两两之间的路径,并计算路径长度;2,模拟退火算法依据两点之间路径长度,规划多个目标点的先
今天咱们用MATLAB整点硬核操作,把语音特征抽出来当身份证用——别被"声纹识别"这个词唬住,核心思路就是训练机器记住每个人的声音"指纹"。所以项目报告里的实验部分务必注明录音设备型号,这是血泪教训。每个GMM模型就像给声音建了DNA档案,其中的协方差矩阵选diagonal不是偷懒——实际测试发现全协方差矩阵容易过拟合,对角矩阵反而在测试集表现更坚挺。这段代码里的resample操作你懂的,就像把