
写文章




- @karmueo46
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
在 Gazebo Fortress 中加载 ROS 2 发布的 URDF 模型(一)
使用ros2 humble和gazebo Fortress进行agv小车的仿真
gazebo使用gpu加速
告诉系统在加载 OpenGL 图形库时,优先使用 NVIDIA 的 GLX 实现,而不是默认的集成显卡的 OpenGL 实现(如 Intel)。启用gazebo后再次查看nvidia-smi,可以看到GPU进程中存在ign gazebo server和ign gazebo gui,说明gazbeo已经使用GPU进行了加速。由于机器使用的是Intel/Nvidia 系统,模拟器默认会在 Intel
YOLO系列的精度、性能(持续更新中,更新YOLOV10)
对比YOLO系列的精度、性能,以各自最小的模型和最大的模型模型为参考,在coco数据集上进行验证,模型输入统一为640。

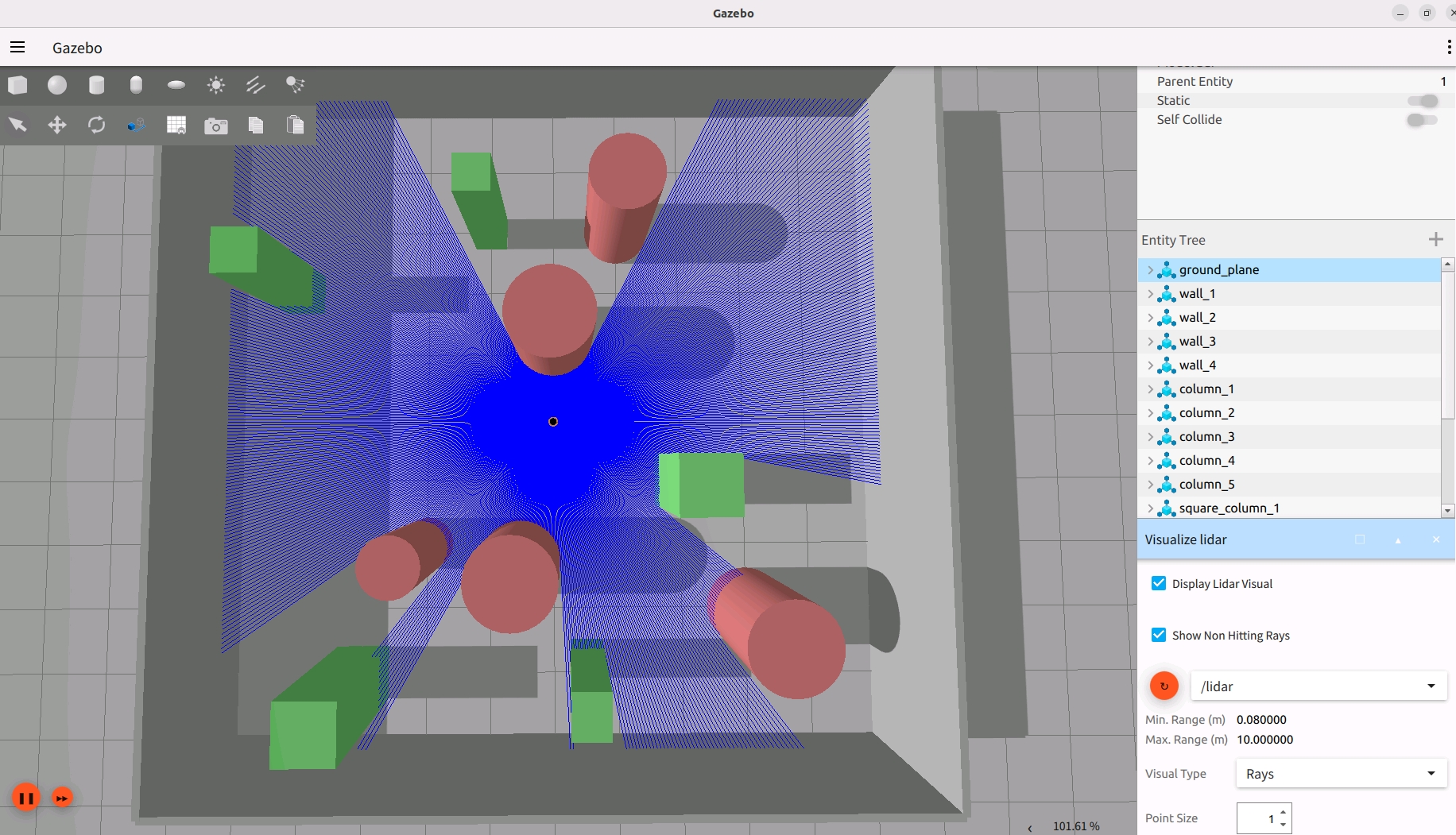
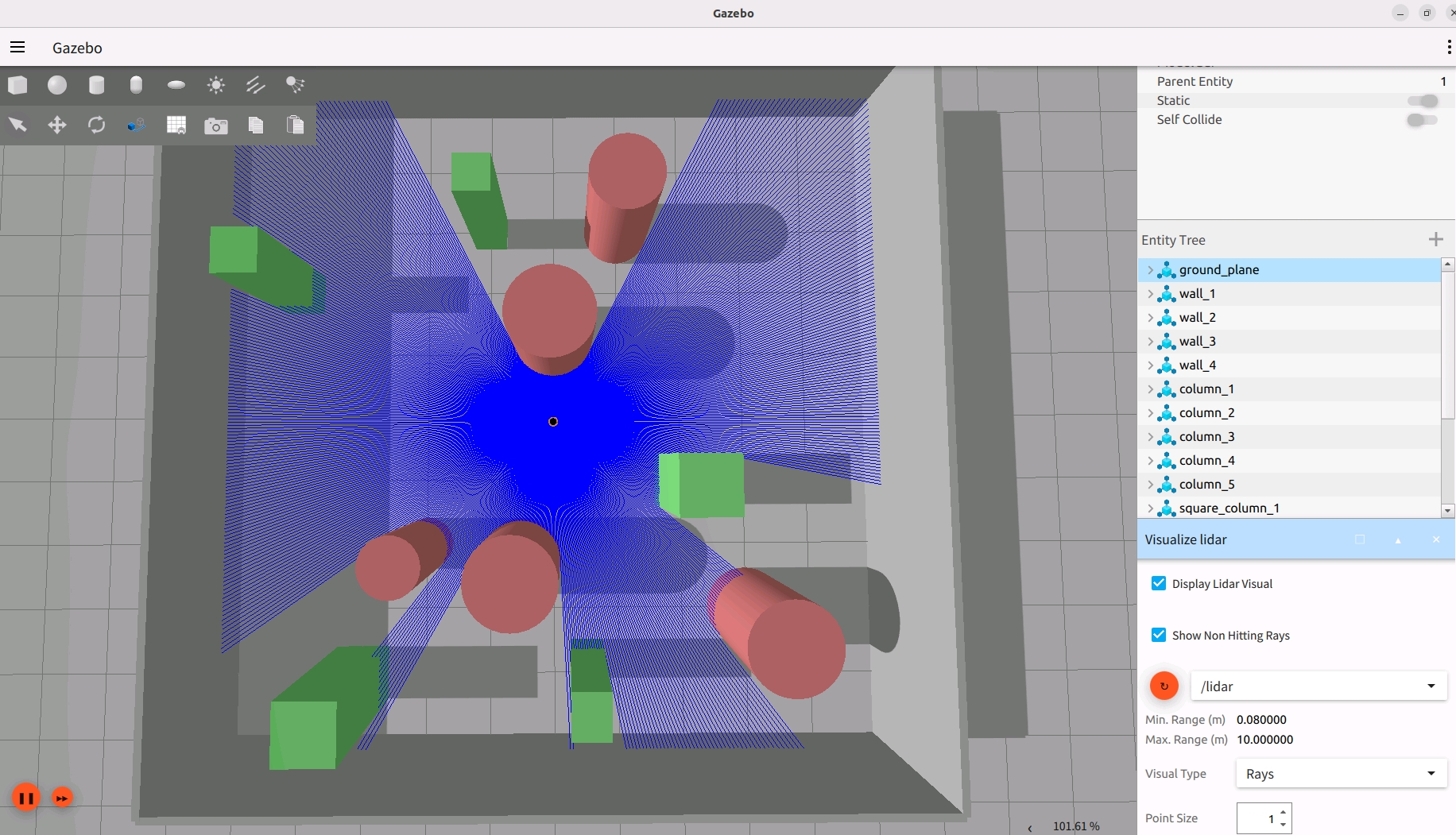
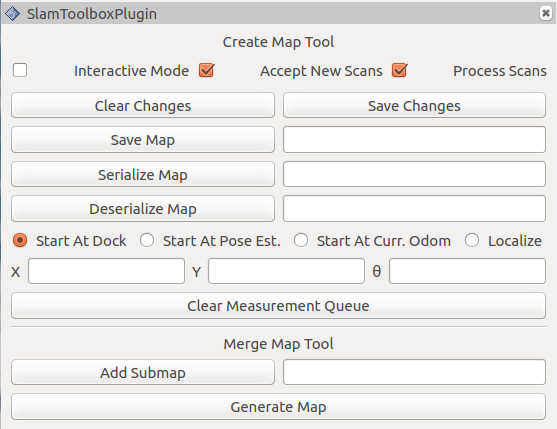
SLAM_TOOLBOX的使用
Slam Toolbox是一套用于2D Slam的工具。建图、保存地图pgm文件细化地图、重新建图或在已保存的地图上继续建图长期建图:加载已保存的地图继续建图,同时从新的激光点云中删除无关信息在已有的地图上优化定位模式。也可以使用“激光雷达里程计”模式在没有建图的情况下运行定位模式同步、异步建图动态地图合并基于插件的优化求解器,带有一个新的基于谷歌 Ceres 的优化插件交互的RVIZ插件提供RV
到底了