
写文章




- @jlx142857
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
平台式惯性导航系统简介(持续更新ing)
惯性导航之平台式惯性导航系统简介(持续更新ing)

基于卡尔曼滤波的捷联惯性/卫星组合导航基本原理
组合导航技术是提高导航系统整体性能的有效途径,本文将介绍基于卡尔曼滤波(Kalman Filter)的捷联惯性导航系统(SINS)/卫星导航系统(GNSS)组合导航的基本原理。

基于MATLAB/Simulink的四旋翼无人机PID控制与仿真(3)
《基于MATLAB/Simulink的四旋翼无人机PID控制与仿真》的第三篇,将为大家继续展示并完善控制与仿真模型。本文将在前文的基础上,完成控制环节增补、参数设置、测试等工作,在不考虑性能(低超调、快、准等)的前提下,保证系统对于一般输入(阶跃、斜坡)的响应稳定性。

基于MATLAB/Simulink的四旋翼无人机PID控制与仿真(1)
基于MATLAB/Simulink的四旋翼无人机PID控制与仿真本文介绍四旋翼无人机动力学基础与控制模型

基于MATLAB/Simulink的四旋翼无人机PID控制与仿真(2)
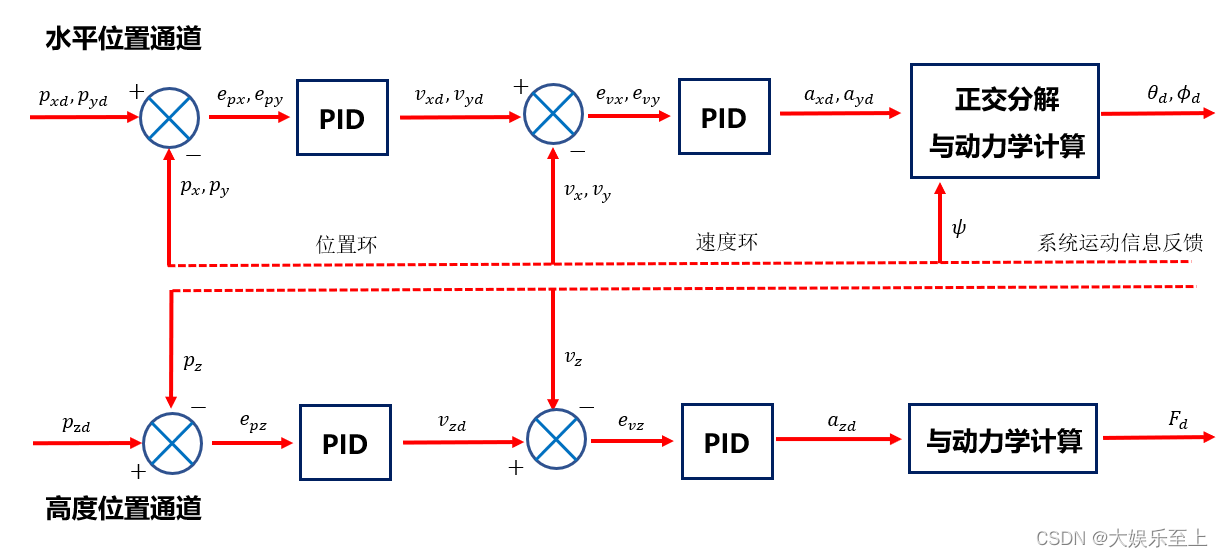
1、承前启后在上一篇文章最后,我们已经基于四旋翼的基本假设和动力学理论得到了线性化的控制模型,特别是援引了《多旋翼无人机-设计与控制》中的底层飞行控制框架。本篇文章将据前文内容进行四旋翼控制系统设计,而后依照设计结果,在MATLAB/Simulink环境中搭建四旋翼控制的仿真模型。2、控制算法说明在本篇文章中,作者将采用基本的PID算法设计控制器。本篇文章所最终搭建的模型将不是测试中采用的最终版本
到底了