- @hardware_player
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
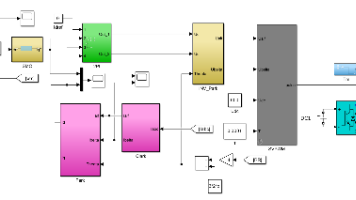
本文介绍了永磁同步电机(PMSM)矢量控制系统的设计与实现。系统采用滑模控制(SMC)作为速度环调节策略,电流环仍使用PI控制,结合SVPWM调制技术实现高性能调速。文章详细阐述了系统各模块的原理,包括永磁同步电机数学模型、SMC控制器设计(滑模面设计、趋近律推导)、电流环PI控制、坐标变换(Clark/Park变换)以及SVPWM调制实现。该系统通过转速外环和电流内环的双闭环控制架构,实现了对电
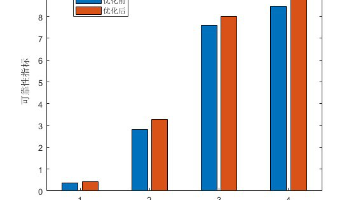
摘要:本文研究了基于粒子群优化(PSO)算法的配电网可靠性优化方法。通过建立包含SAIFI、SAIDI、CAIDI和AENS四项核心指标的可靠性评估体系,构建了融合成本函数与可靠性惩罚项的综合适应度函数。PSO算法通过模拟鸟群觅食行为,迭代优化配电网线路参数,在满足可靠性阈值的前提下实现成本最优。仿真结果表明,该方法能有效改善配电网可靠性指标,为电力系统规划提供优化决策支持。
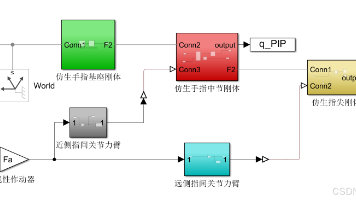
摘要:本文基于Simulink构建了仿生手指多体动力学模型,包含线性作动器驱动和腱传动机构。仿真结果显示,PIP关节在阶跃力输入下能快速响应至125°,调节时间0.5s;DIP关节同步响应至65°,体现了腱传动的力臂耦合特性。模型采用多刚体运动学建模和腱传动力臂转换原理,通过Simscape Multibody模块实现三段刚体(基座、中节、指尖)的关节串联。完整工程文件可通过指定关键词获取。
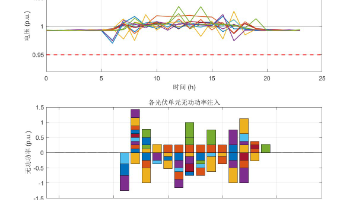
摘要:本文提出了一种基于Q学习和牵制一致性算法(PCA)的分布式光伏集群优化调度策略,以解决光伏大规模接入导致的配电网电压越限问题。该策略采用分层架构:通过DTW算法进行光伏集群划分;建立双层优化模型实现集群间功率分配;在集群内部融合Q学习与PCA算法,实现分布式光伏单元的智能协同控制。仿真结果表明,该方法能有效降低通信负担和计算复杂度,提升电压调节的实时性与鲁棒性。系统通过Q学习的自适应决策与P
摘要:本文介绍了异步电机直接转矩控制(DTC)系统的设计与实现。DTC通过直接控制定子磁链和电磁转矩实现高性能调速,具有响应快、结构简单等优势。系统采用三相电压电流信号采集、坐标变换、定子磁链观测和转矩估算等核心算法,通过电压矢量选择实现快速转矩调节。仿真模型基于Matlab2024b构建,包含电机参数设置、PI控制器设计等关键程序。相比矢量控制,DTC仅依赖定子电阻参数,抗干扰能力更强,特别适用
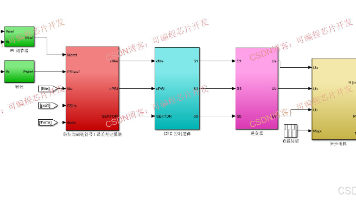
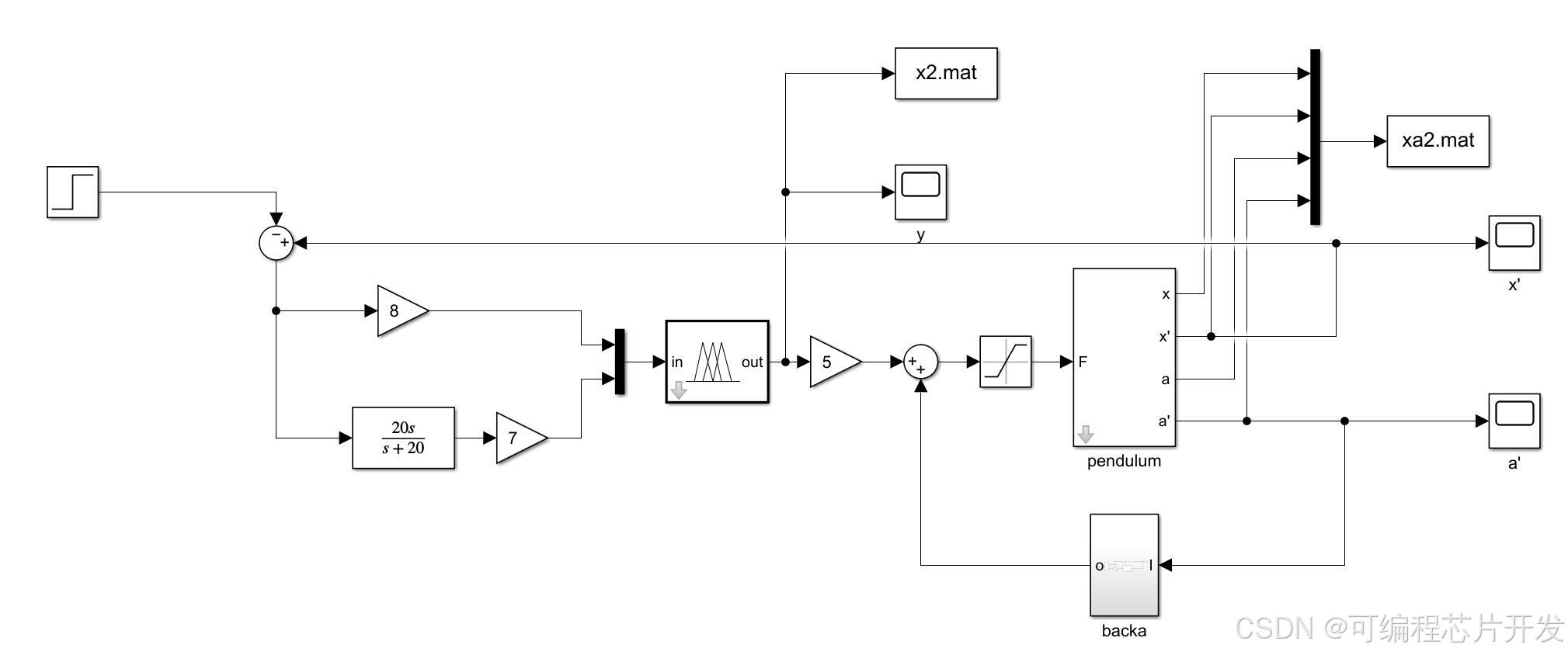
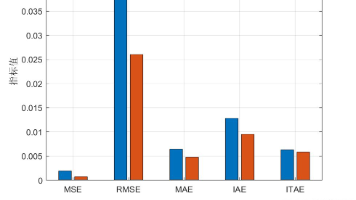
倒立摆是一个典型的不稳定、非线性、强耦合的控制对象。其控制目标是通过施加合适的力(或扭矩)使倒立摆能够在垂直位置附近保持平衡。在本课题中,基于神经网络控制器的倒立摆控制系统simulink建模与仿真,对比模糊控制器。倒立摆是一个典型的不稳定、非线性、强耦合的控制对象。其控制目标是通过施加合适的力(或扭矩)使倒立摆能够在垂直位置附近保持平衡。模糊控制器是基于模糊规则和隶属度函数构建的,其规则库需要人
本文提出一种基于BP神经网络的PID控制器,通过神经网络的自学习能力实时优化PID参数,解决传统PID在非线性、时变系统中的控制问题。系统采用3输入-1隐含层-3输出的BP网络结构,能自动调整比例、积分、微分参数,实现"控制-反馈-优化"闭环。仿真结果表明,相比传统PID,该控制器具有更小超调、更快响应和更强抗干扰能力,适用于电机控制、温度调节等场景。研究提供了完整的MATLA
本文提出了一种基于多模型协同的超短期电力负荷预测方法。通过VMD变分模态分解将负荷序列分解为多个IMF子序列,分别采用BiLSTM和DELM模型进行预测,并利用改进Q学习算法动态优化组合权重。仿真结果显示,组合模型的MAPE和RMSE指标显著优于单一模型,验证了所提方法在捕捉负荷非线性特征方面的有效性。该方法为电力系统超短期负荷预测提供了一种精度更高、适应性更强的解决方案。
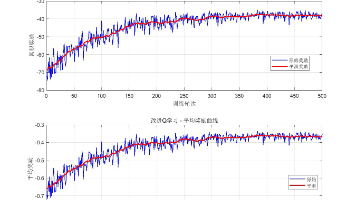
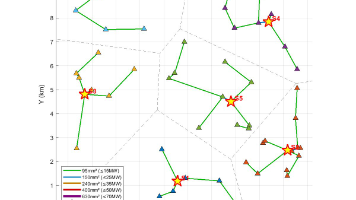
本文提出了一种基于Voronoi自适应分区和Q学习粒子群算法(QLPSO)的海上风电场电气系统拓扑优化方法。针对多变电站选址、电缆选型和功率损耗优化问题,建立了以最小化总成本为目标函数的数学模型。算法采用三层结构:外层Q学习控制器动态调整PSO参数,中间层PSO优化变电站位置和分区方案,内层解码器生成电缆连接拓扑。创新性地引入Voronoi图实现自适应分区,通过Q学习机制根据种群状态选择最优PSO
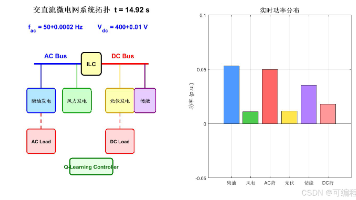
本文提出基于Q学习的交直流混合微电网负荷频率控制方法。针对传统控制依赖精确模型、难以应对源荷扰动的问题,采用无模型强化学习算法,通过状态空间离散化(频率/电压偏差)、动作空间定义(128级控制信号)和奖励函数设计,实现自适应频率调节。系统包含交流侧频率模型、直流侧电压模型、互联变换器模型和源荷扰动模型。Matlab仿真验证了该方法的有效性,核心程序涵盖参数设置、Q学习超参数配置和状态-动作值函数更