




- @fuhanghang
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
及格线:TPS > 10(能跟上人类阅读速度,不觉得卡)。优秀线:TPS > 50(几乎是瞬间生成大段文字)。工业级目标:追求极高的 TPS(如 1000+),是为了同时服务成千上万的用户,降低单次推理的成本。
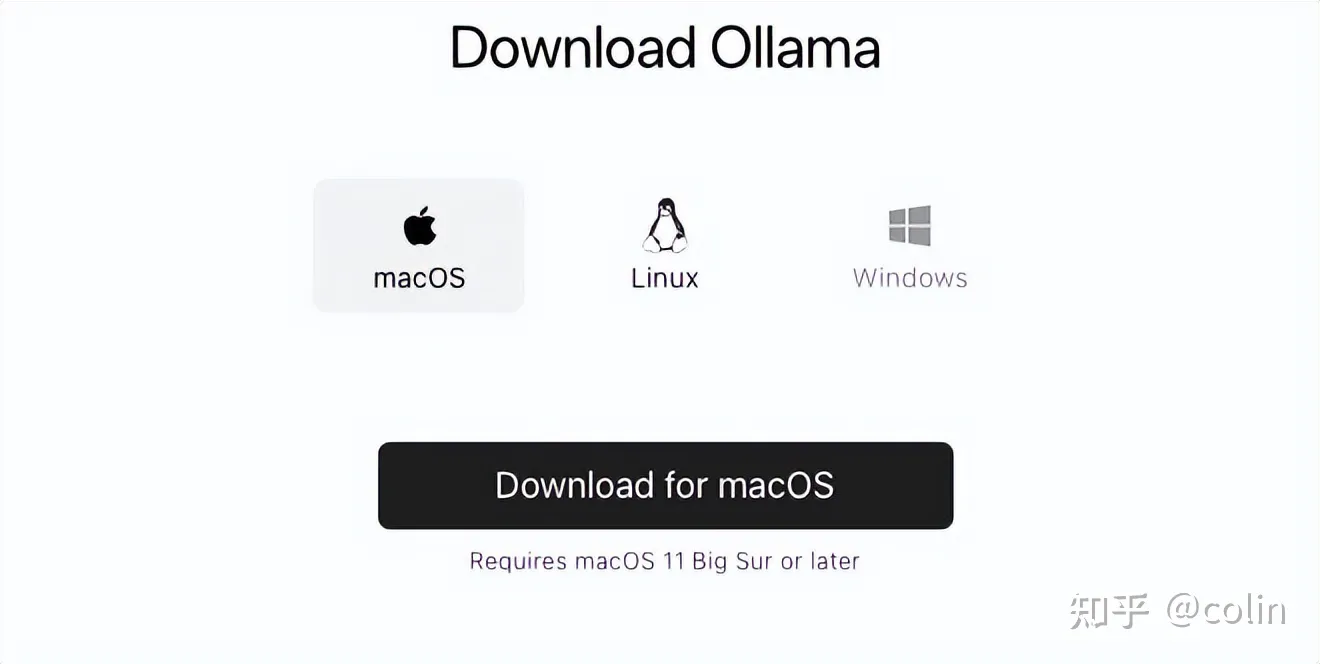
例如,至少需要 8GB 的内存/显存来运行 7B 模型,至少需要 16GB 来运行 13B 模型,至少需要 32GB 来运行 34B 的模型。:Ollama 支持多种大型语言模型,如 Llama 2、Code Llama、Mistral、Gemma 等,并允许用户根据特定需求定制和创建自己的模型。:它将模型权重、配置和数据捆绑到一个包中,称为 Modelfile,这有助于优化设置和配置细节,包括
Qwen3-ASR 系列包括Qwen3-ASR-1.7B 和 Qwen3-ASR-0.6B,支持52 种语言和方言的语言识别与语音识别(ASR)。两者均利用大规模语音训练数据以及其基础模型 Qwen3-Omni 强大的音频理解能力。实验表明,1.7B 版本在开源 ASR 模型中达到业界领先水平,并可与最强的商业闭源 API 相媲美。一体化:Qwen3-ASR-1.7B 和 Qwen3-ASR-0.
-clean:在SQL文件中添加清理(DROP)语句,这对于重建数据库很有用。:在DROP语句中添加IF EXISTS,避免因对象不存在而导致的错误。:只导出数据,不导出模式(DDL)。:只导出模式(DDL),不导出数据。通过这些方法,你可以灵活地备份PostgreSQL中的特定schema或多个schema。
本文详细介绍了如何将服务器上的 PGSQL 测试数据库数据导出并导入到本地 Windows 系统的数据库中。首先,通过 pg_dump 命令在服务器上进行数据备份,然后将 .sql 文件下载至本地。接着,切换到 PGSQL bin 目录,执行包含数据库名、地址、端口、用户名及 sql 文件路径等参数的命令,完成数据导入。最近想把服务器上的测试数据库数据导到我本地的电脑上,本地电脑数据库是安装在wi
WebAssembly(wasm)是一种新型的二进制指令集,它可以在现代Web浏览器中运行,以提供高性能的Web应用程序。与传统的JavaScript相比,WebAssembly被设计成一种更高效的运行时环境,可以使开发人员更好地利用硬件资源,并获得更快的加载速度和更低的内存占用。
为了实现Vue 应用在 Linux 上的一键安装和自动升级1、首选框架Electron。2、打包格式:优先选择AppImage(免安装、兼容性好、易升级),辅以.deb(针对 Ubuntu/Debian 深度集成)。3、核心工具链(开发) +(打包) +(升级)。4、交付物:一个.AppImage文件 + 一个部署在 Nginx 上的更新目录。用户下载后chmod +x即可运行,程序内部会自动检查
操作系统的很多细节,其实都带着历史的痕迹。root但无论叫什么,它们都代表系统的最高控制权限。
特性镜像 (Image)容器 (Container)本质静态的、只读的模板动态的、运行中的实例类比类 (Class)对象 (Object)文件系统只读,由多个层堆叠而成在镜像之上增加一个可写层生命周期持久化存储,除非被显式删除短暂的,可以随时创建和销毁常用命令docker rundocker psdocker rm一个形象的比喻:如果把 Docker 镜像比作一个光盘,那么容器就是用这张光盘安装并
直接指定解释器路径,可能因系统而异(如 Ubuntu 可能指向 Python 2,而 macOS 可能不存在该路径)。是 Python 脚本的标准 Shebang,用于指定解释器路径,确保脚本在不同环境中能正确执行。在 Windows 中,Shebang 通常被忽略,但 Python 解释器仍能正确执行脚本。Windows 默认不支持 Shebang,但 Python解释器会自动处理。在 Linu