
写文章




- @foreverheart7
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
3d点云转2d
rviz_MID360.launch会发送sensor_msgs/PointCloud2话题类型的/livox/lidar,是rviz可以显示的点云类型msg_MID360.launch会发送livox_ros_driver2/CustomMsg话题类型的/livox/lidar,是fast_lio要求输入的数据类型。
Launch文件的使用和编写
编写launch文件可以有三种方式,python、yaml、xml这三种方式,但是官方推荐的是使用python格式,因为python是一种编程语言,可以使用python的一些库来进行一些工作。它允许我们可以同时和配置多个包含ROS2节点的可执行文件,在ROS2中可以使用python来写launch文件。假设已经存在很多的单独的launch文件用于启动不同的功能,如果需要同时启动这些launch文件
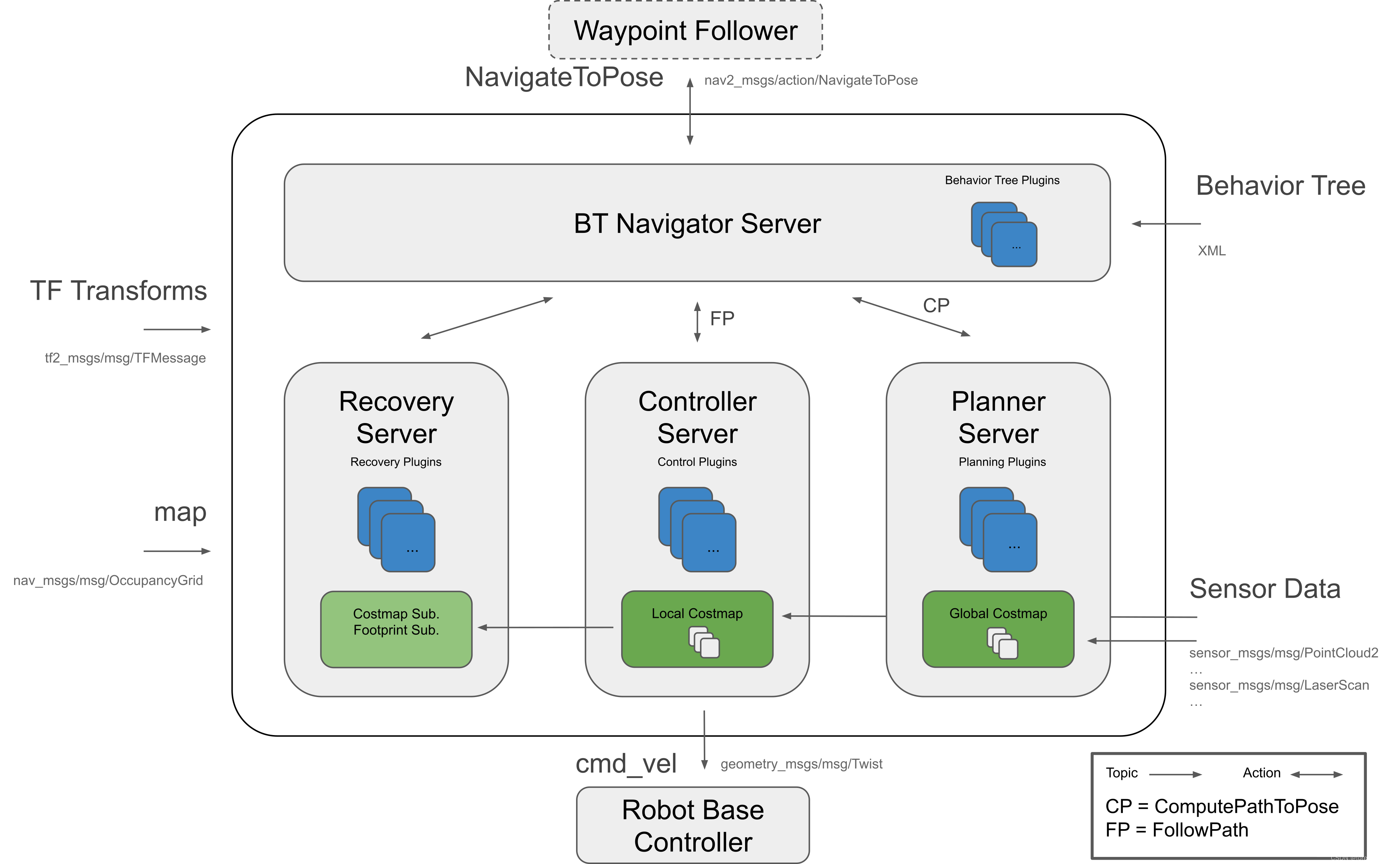
ROS2+nav2实现导航(上)
目录编辑一.Nav2导航框架介绍与安装1.1安装二进制nav21.2源码安装,在fishibot_ws/src目录下进行安装1.3安装依赖1.4编译1.5测试是否安装成功二.配置nav22.1我们需要创建一个文件夹放置配置文件、launch文件、rviz配置和地图等。进入到src目录下,使用下面指令创建功能包:2.2添加maps等文件夹2.3创建参数文件三.注释:1.source工作空间方法2.
到底了