
写文章




- @dbqwcl
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
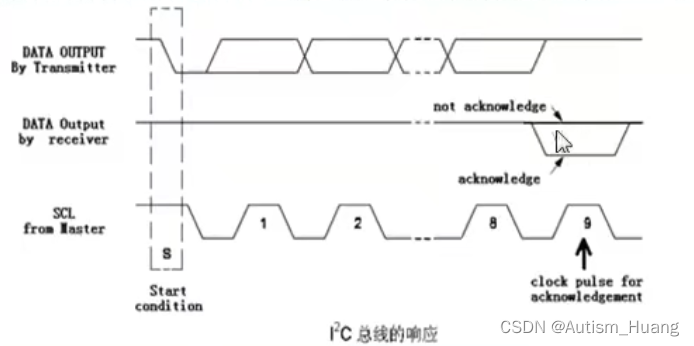
STM32 I2C通信协议+CubeMx配置
两线式串行总线。由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据。(半双工通信 )在CPU与被控IC之间、IC与IC之间进行双向传送,高速IIC总线一般可以达到400kbps以上。
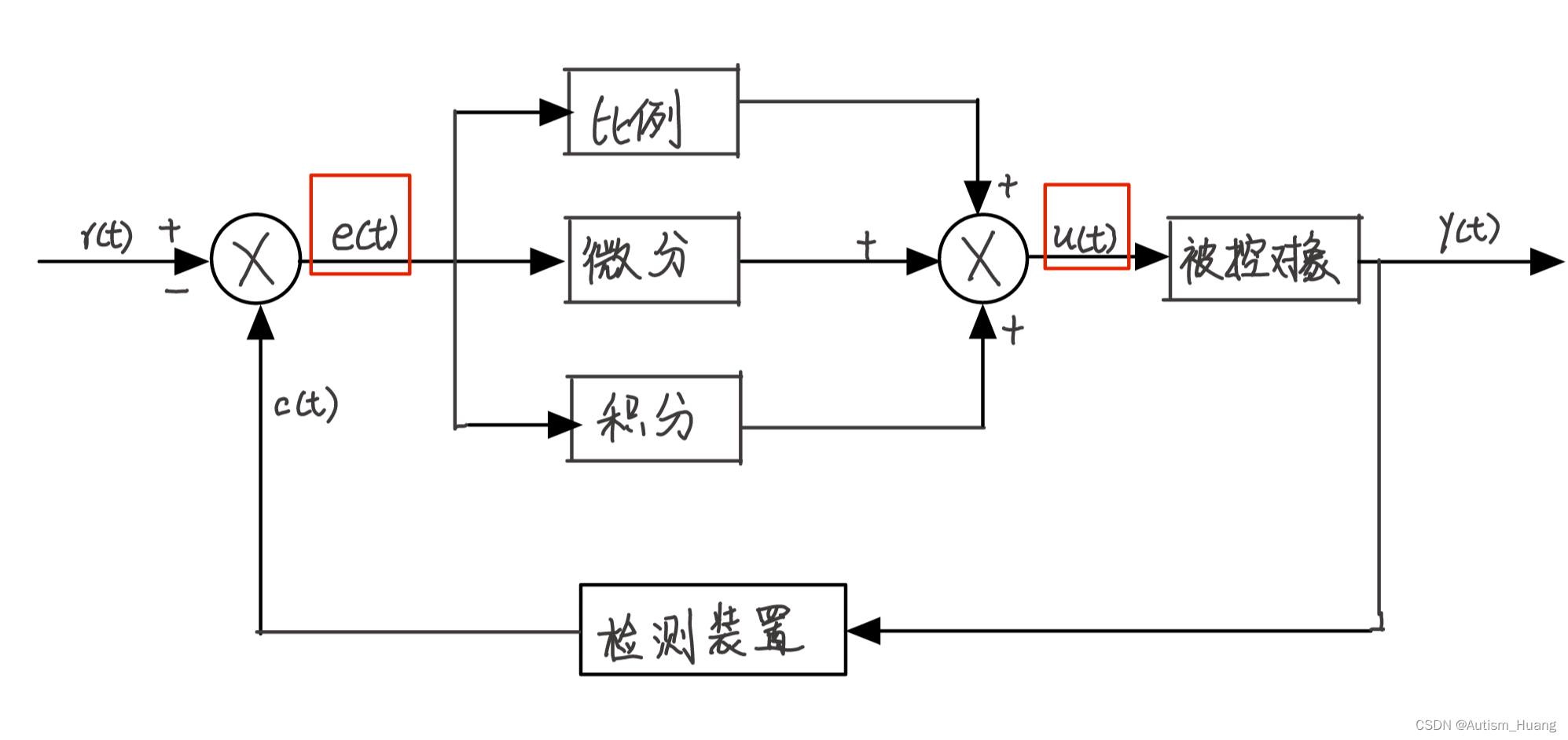
PID控制器算法-Simulink仿真
上图是一个闭环控制系统地框图:假设是调试一个电机的速度,上图的r(t)是目标速度,y(t)是速度输出量,e(t)是速度误差,u(t)是PID计算后发送给电机的输出值,被控对象是电机,假设PID控制器为C(s)=U(s)E(s)C(s)=\frac{U(s)}{E(s)}C(s)=E(s)U(s),传递函数为G(s)=Y(s)U(s)G(s)=\frac{Y(s)}{U(s)}G(s)=U(s)Y
到底了