- @cnbestx
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
UC伯克利推出DoasIDo框架,仅用网络视频即可训练机器人完成精细操作。该方案通过4D手物重建(改进SAM3D时序跟踪+扩散模型处理遮挡)和动力学重定向(MPPI优化抗扰控制),将野外视频任务成功率从25%提升至71%。在UR3e双臂机器人+SharpaWave灵巧手上验证了20类日常任务,包括搅拌、书写等高精度动作。研究突破传统依赖昂贵遥操作数据的局限,利用海量网络视频生成可行轨迹,结合UR机

马里兰大学和佐治亚理工学院团队提出"OmniTacTune"方法,通过视触觉传感器GelSightMini和两阶段强化学习,使机器人能在不重新训练视觉策略的情况下,利用触觉反馈进行精细操作修正。实验显示,该方法仅需40-80分钟训练,就能将插孔、充电等精细操作的成功率从5-40%提升至85-100%。GelSightMini传感器的高分辨率触觉成像和实时3D表面数据采集能力是该技术成功的关键硬件支

采用纯机械磁路换向,无交变电磁辐射,不会干扰传感器、工业视觉、精密检测设备,可满足具身智能算法测试、航空精密零部件试制等高精科研需求,彻底解决传统磁吸设备干扰实验数据的痛点。依托双稳态永磁技术,构建MAP、MRP、LI-120全系列矩阵,适配高校科研、新能源、汽车制造、油气重工等场景,是自动化物料抓取升级的高效方案。油气重工适配圆管无损吊装,保护工件防腐涂层,助力仓储无人化落地。机器人自动化、精密

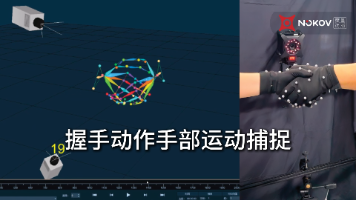
NOKOV度量科技与上海姬器人科技合作完成人手-机器人握手交互场景的光学动作捕捉抗遮挡测试。针对握手时的高自遮挡问题,NOKOV采用反算标记点、虚拟标记点和智能三维重建算法三项技术,实现了21个人手标记点的稳定追踪,数据未出现跳点或丢失。该测试验证了NOKOV系统在高交互人机协作场景中的可靠性,为具身智能的人机交互技能训练提供了有效数据支持。NOKOV是国内专业的光学动作捕捉厂商,其系统可满足多种
Tesollo推出DG-5F-S轻量化灵巧手,专为人形机器人和具身智能研发设计,主打精细操作。相比重载款DG-5F-M,S款减重50%至880g,保持20DoF自由度,控制频率提升至500Hz,更适合末端负载敏感的场景。两款产品针对不同需求:S款侧重仿生精细操作,M款适合工业重载。软件生态通用,支持ROS2和多模态传感器。选型建议根据机械臂负载和任务需求决定,反映人形机器人赛道向轻量化仿生与工业重

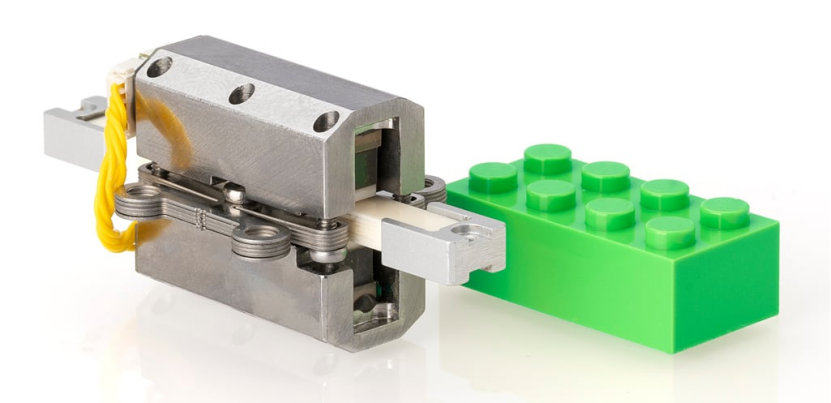
针对纳米定位、强磁 / 真空特殊工况、狭小集成空间研发项目,piezomotor 电机(直线 / 旋转两类 piezomotor 压电电机)提供区别于传统电磁驱动全新方案,推力覆盖 6.5N 至 450N,支持 OEM 模块化定制。轻型 LT 系列:LL06、LT20、LT40 piezomotor 直线电机,推力 6.5~40N,行程最高 72mm,体积小巧,无磁款适配 3T MRI 腔内 SE
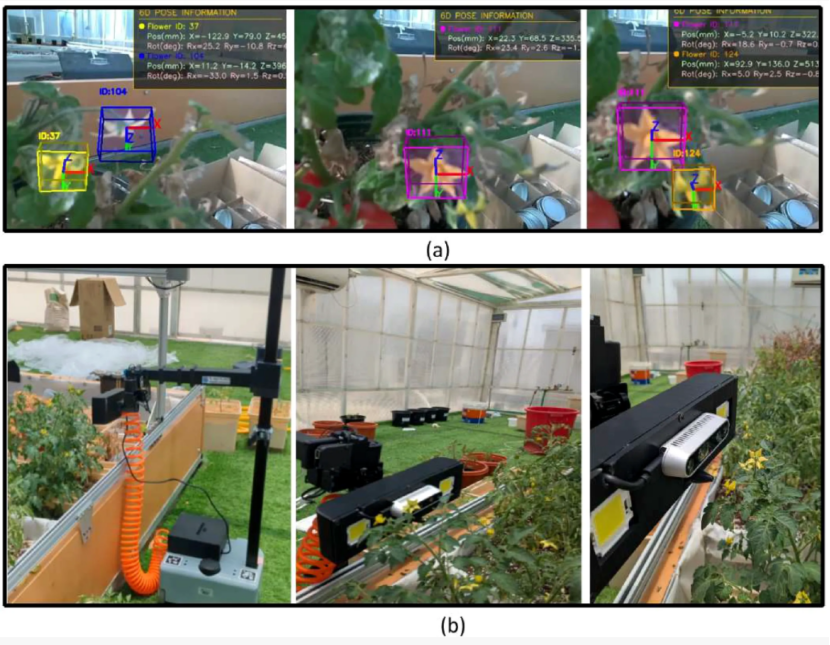
核心难点在于机器人必须在复杂的温室环境中精准识别花朵,并以正确的角度和距离进行“气流刺激”。凭借其轻量化的机械臂和高度集成的传感器套件,高度契合了这套复杂的视觉伺服系统。研究团队利用ROS将感知算法与机器人的运动控制无缝对接,实现了从“看到花”到“对准花”的闭环控制。:Stretch拥有垂直升降的桅杆和伸缩臂,这种运动学结构使其非常适合在狭窄的温室垄间穿梭,并能覆盖从地面到高层作物的广阔空间。在实
Haption自2001年成立以来,始终专注于与定制化解决方案的设计、研发及销售。作为工业级力反馈技术的先行者,其核心产品以高精度交互与可靠性著称,已与达索系统、空客、Orano 等行业头部企业达成深度合作,业务覆盖工程仿真、工业机器人、医疗健康及科研等多元领域。

这种触觉感知使机器人能像人类一样感知外界环境,如工业场景中抓取物体时,AIRSKIN®感知抓取力度,避免损坏或滑落,提升操作精度和环境适应能力。压力传感器能够捕捉外部施加的微小压力变化,柔性外壳则提供了保护和适应性,使其能够覆盖机器人表面。AIRSKIN®机器人安全电子皮肤利用先进的压力感应技术,通过采集和处理压力信号,快速响应外部压力变化。这种技术增强了机器人对环境的感知,提高了复杂场景中的安全

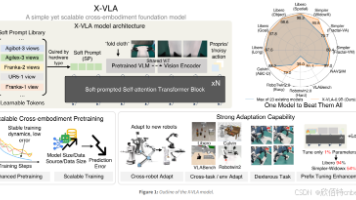
清华大学与上海人工智能实验室等联合发布X-VLA跨体化视觉-语言-动作模型,松灵机器人旗下CobotMagic开源双臂遥操机器人作为核心硬件平台参与实验验证。该机器人凭借多视角感知和高精度操作能力,成功完成布折叠等复杂任务,为X-VLA模型提供了稳定的硬件数据支撑。实验结果表明,X-VLA模型在灵巧操作和跨机器人适配方面表现稳定。松灵机器人将持续推进具身智能遥操作技术研发,完善开源生态布局,促进硬