




- @cccnz
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
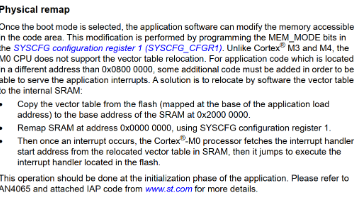
最近使用了一款芯片是STM32F030F4(Cortex-M0内核),在编写把ootloader → pp 跳转代码时,发现它中断向量表的重映射方法与常见的F10x4(Cortex-M3内核)/F40x4(Cortex-M4内核)不同,遇到了新的现象,记录一下结论:Cortex-M0 没有 VTOR 寄存器,不能像 M3/M4 那样用 SCB->VTOR 改中断向量基址。
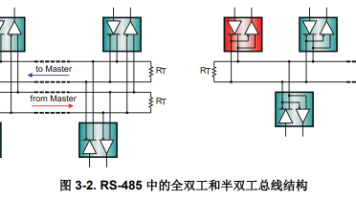
几个核心概念:总线(Bus): 总线可以理解为一种公共的通信通道,在总线型网络中,所有设备都共享同一条物理线路。这种架构非常适合多点通信,即一个设备可以在一条线路上与多个设备进行通信差分信号: 差分信号是一种通过两根线之间的电压差来传输信息的信号。这两根线通常被称为A和B(或H和L)与此相对的是单端信号,它只使用一根信号线和地线间的电压差来传输信息为什么要差分传输?差分信号最大的优点在于其强大的抗
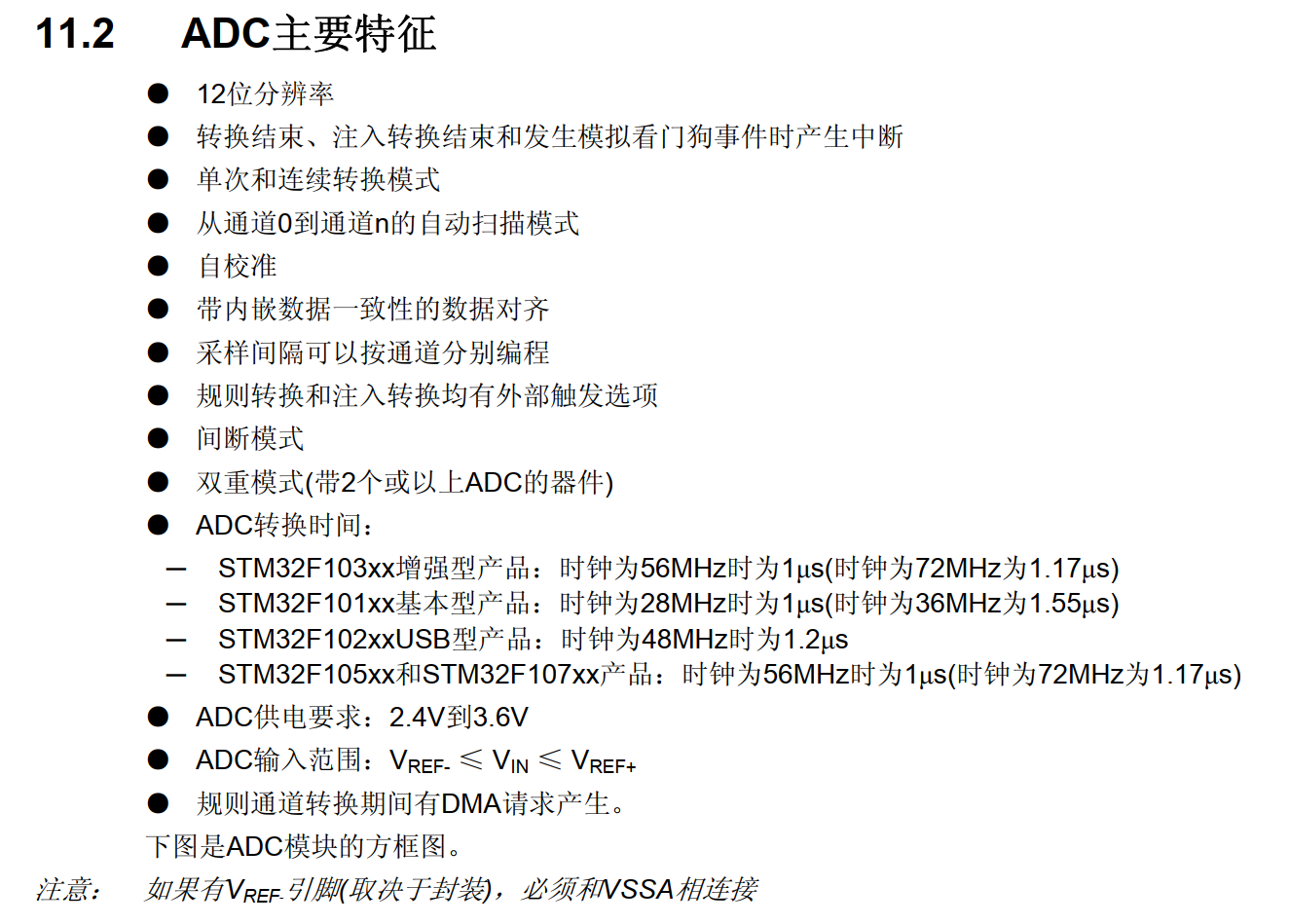
STM32内置逐次逼近型(SAR)ADC采用12位分辨率,通过DAC和比较器逐位逼近输入电压实现模数转换,量程默认0-3.3V(由VREF+决定),支持外接调理电路扩展测量范围。其核心参数包含0.8mV理论精度、受Nyquist定理约束的采样频率(≥2倍信号频率),以及由采样时间(可编程)和12.5时钟周期组成的转换时间。实际应用中需注意参考电压稳定性问题,可通过内部VREFINT校准或外接高精度
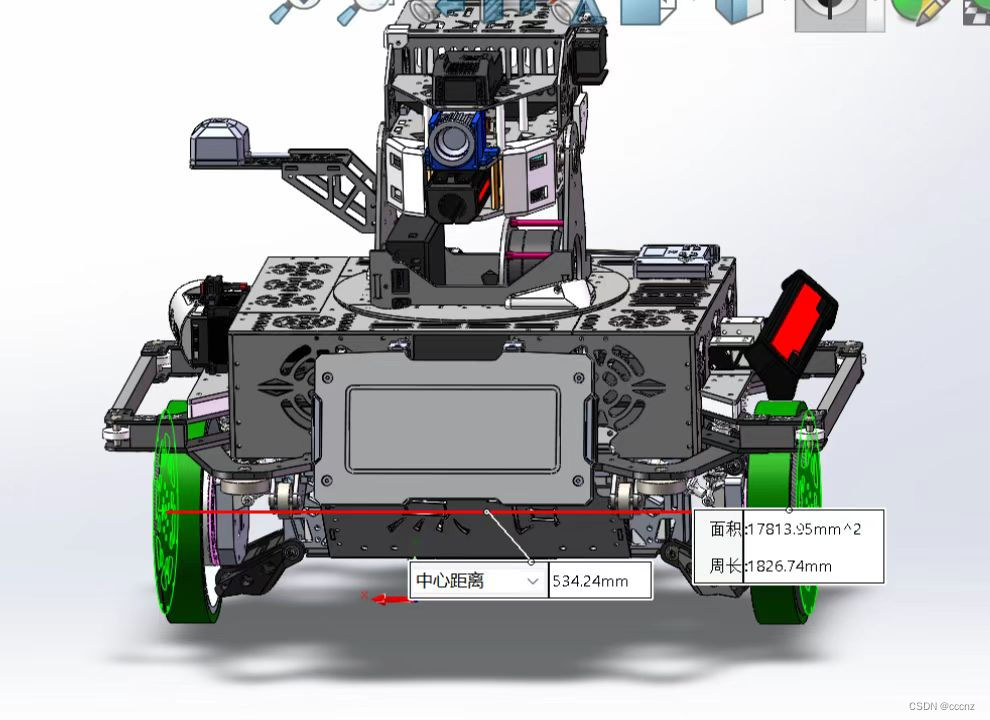
这是我2023年参与研发的二轮平衡机器人(比赛需要),当时一边编写控制代码一边写文档记录学习过程,现在有空整理一下将其中部分内容摘录出来
这是我2023年参与研发的二轮平衡机器人(比赛需要),当时一边编写控制代码一边写文档记录学习过程,现在有空整理一下将其中部分内容摘录出来