- @ZakqPTLar
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
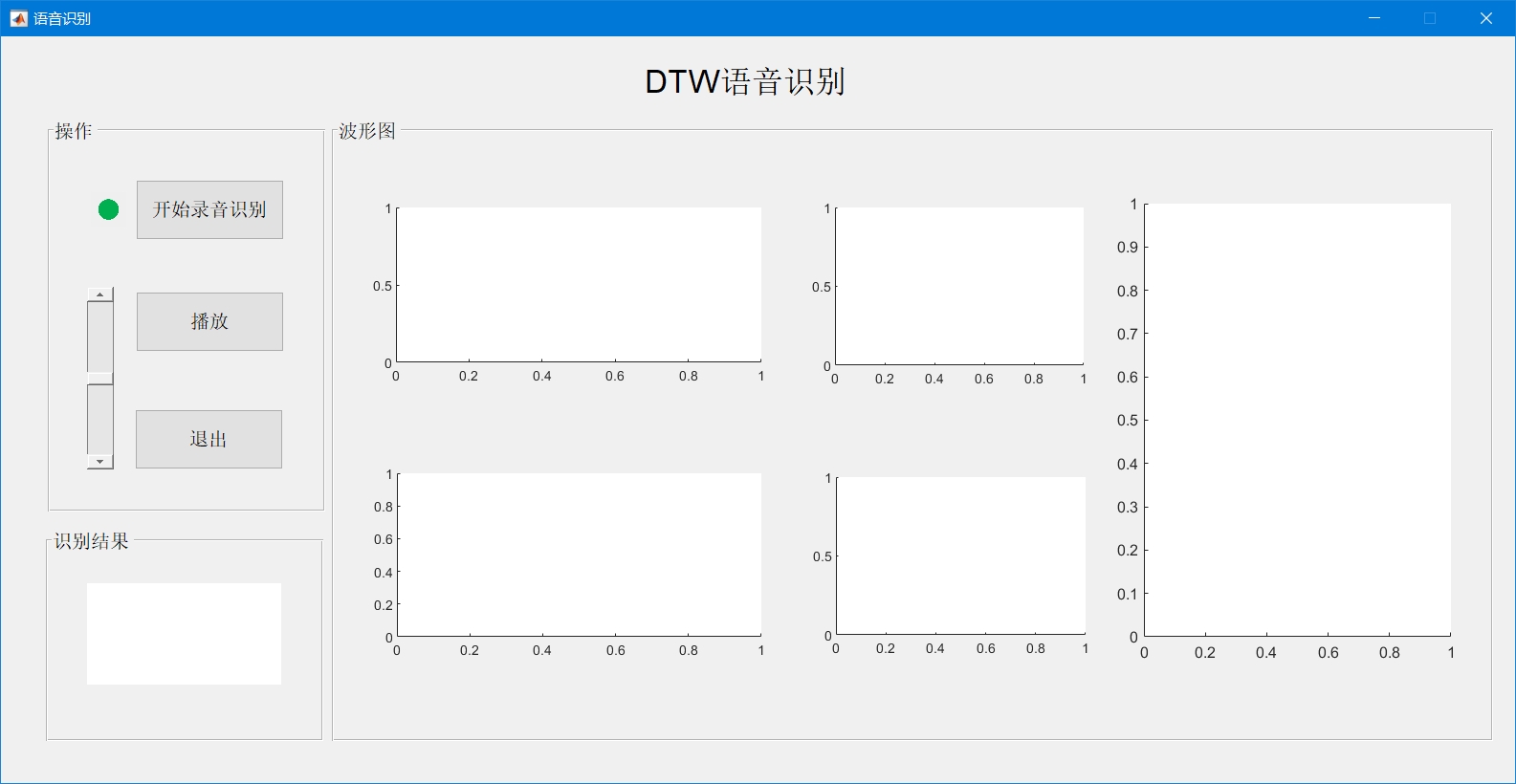
本系统是基于MATLAB平台开发的特定人孤立词语音识别系统,核心功能为识别0-9共10个数字语音。系统采用动态时间规整(DTW)算法实现语音特征匹配,结合梅尔频率倒谱系数(MFCC)提取语音关键特征,通过图形用户界面(GUI)提供直观的人机交互,涵盖语音采集、预处理、特征提取、模板训练与识别全流程,可满足基础数字语音识别场景的功能需求。
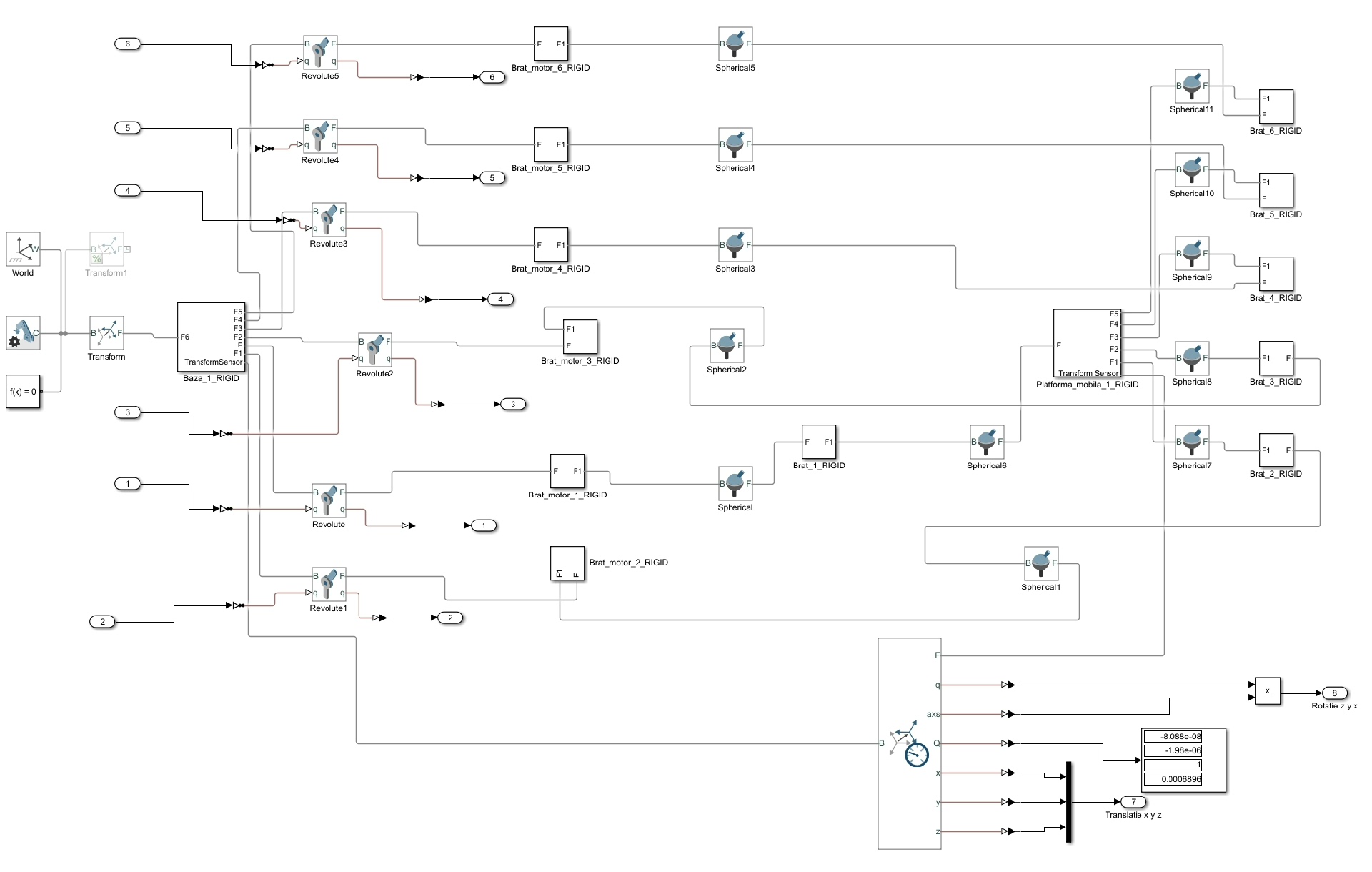
斯图尔特机器人Stewart平台 并联机构仿真 逆向运动学 simulink simscape①首先在Solidworks中设计并导入 Matlab Simscape Multibody;②设计控制算法并在Simscape进行验证;③附带嵌入式代码:采用Arduino Uno、6 个步进电机和 3 个电感传感器完成。Simscape Multibody 模拟 6 个基本运动:X 轴平移、Y 轴平移
LT6911UXC和LT9611UXC芯片凭借其强大的功能和灵活的配置,成为HDMI转MIPI应用中的佼佼者。无论是智能电视、车载显示系统还是工业显示设备,这两款芯片都能提供出色的性能和可靠性。对于开发者来说,龙讯半导体提供的丰富开发资源也大大降低了开发难度,缩短了开发周期。龙讯lt6911uxc,lt9611uxc资料,有源码固件,支持4k60,支持对接海思3519a和3559a,hdmi转mi
代码仓库里还埋了个彩蛋——在日志系统里随机打印扫地路劲的颜文字,比如(≧∇≦)/~~ 这种,算是给苦逼的嵌入式开发加点乐趣吧。企业级代码最怕的就是牵一发动全身,特别是OTA这种要命的功能,得保证升级失败还能回滚到稳定版本。扫地机器人 源代码 企业级 扫地机器人源代码额外加一份iap升级,代码整齐,注释清楚。扫地机器人 源代码 企业级 扫地机器人源代码额外加一份iap升级,代码整齐,注释清楚。扫地机
这段代码在做的,其实就是模拟人类驾驶员换挡时的犹豫——加速太猛会追尾,减速太急会被后车滴。参数max_accel控制着机器人的"路怒指数",实验室里那台编号007的机器人就是因为这个值设大了,总在拐角处表演托马斯回旋。好的路径规划,应该像煮泡面——在煮烂和夹生之间找到刚刚好的平衡点。蹲在实验室调了三天参数后,我终于搞明白了DWA算法的核心奥义——不是代码写得越复杂越好,而是要在混乱中建立秩序。调试
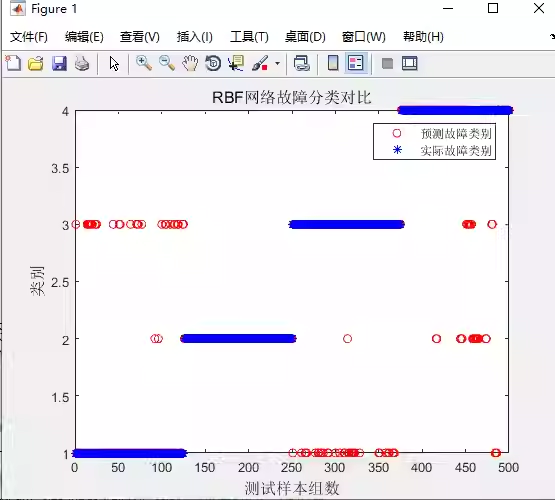
本系统采用MATLAB平台开发,利用RBF神经网络对故障数据进行分类识别。系统核心功能包括数据预处理、网络训练、故障分类和性能评估,形成一个完整的故障诊断解决方案。
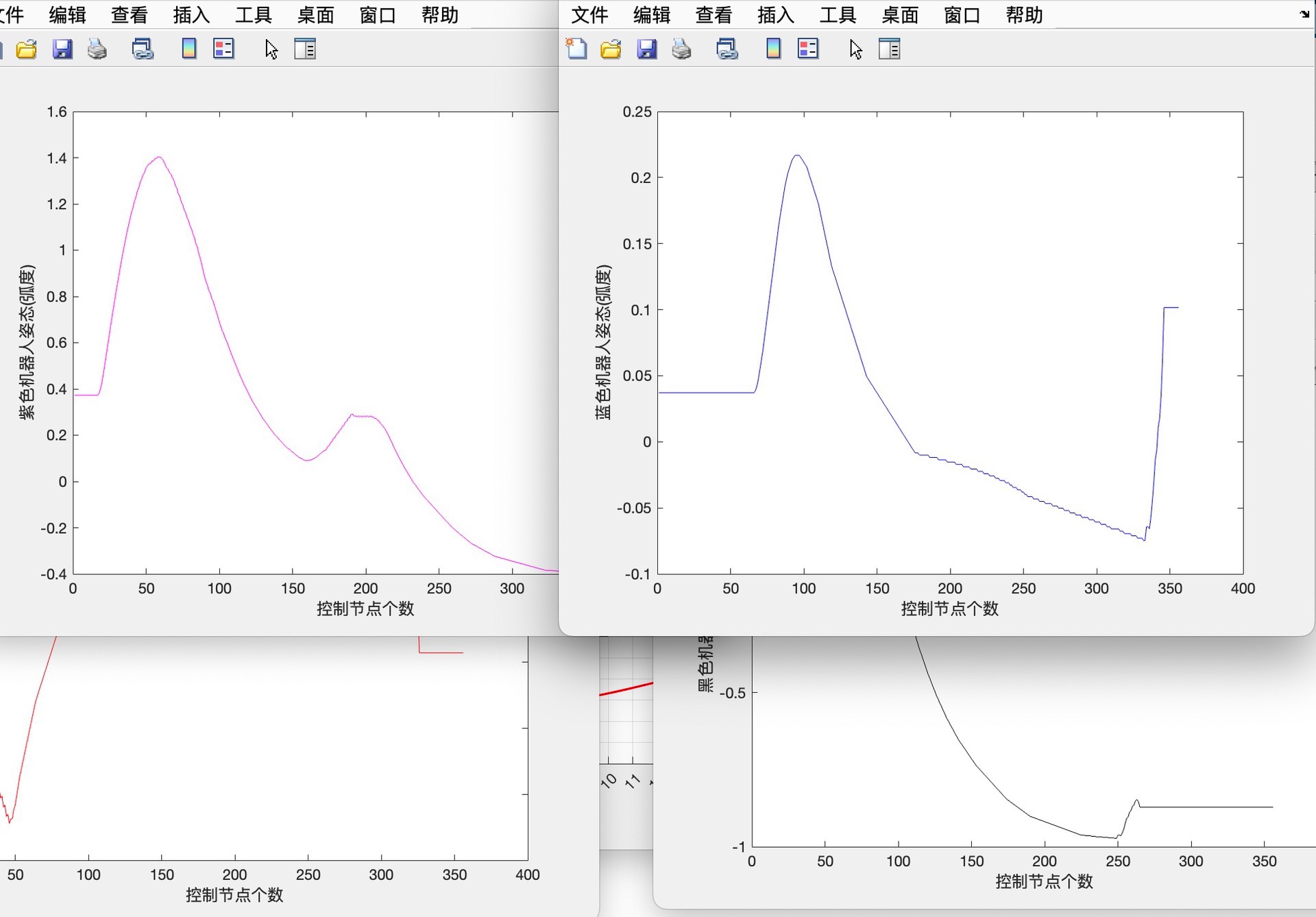
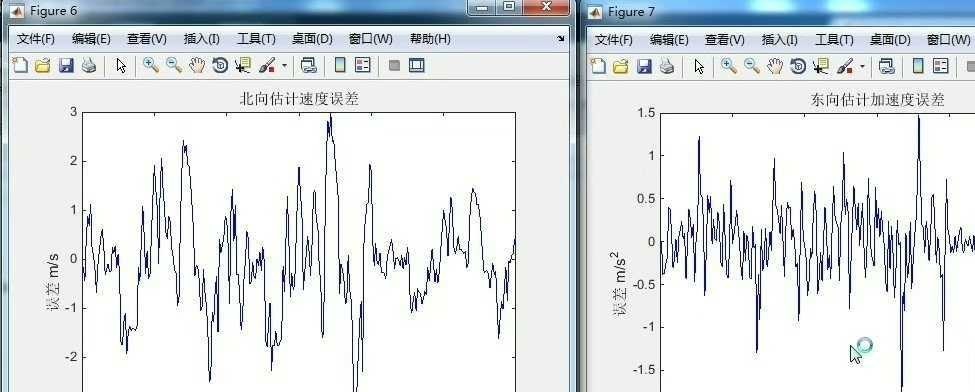
在轨迹跟踪的江湖里,传感器就像一群各怀绝技的探子——GPS报位置,IMU测加速度,摄像头识图像。实际工程中,经常是AUKF打主力,AEKF作备胎,UKF当快速验证工具——这组合拳比单打独斗香多了。扩展卡尔曼滤波(EKF)的线性化操作像用美工刀切牛排,AEKF给这把刀加了个弹簧机关——自适应噪声调节。多传感器信息融合,卡尔曼滤波算法的轨迹跟踪与估计AEKF——自适应扩展卡尔曼滤波算法。多传感器信息融
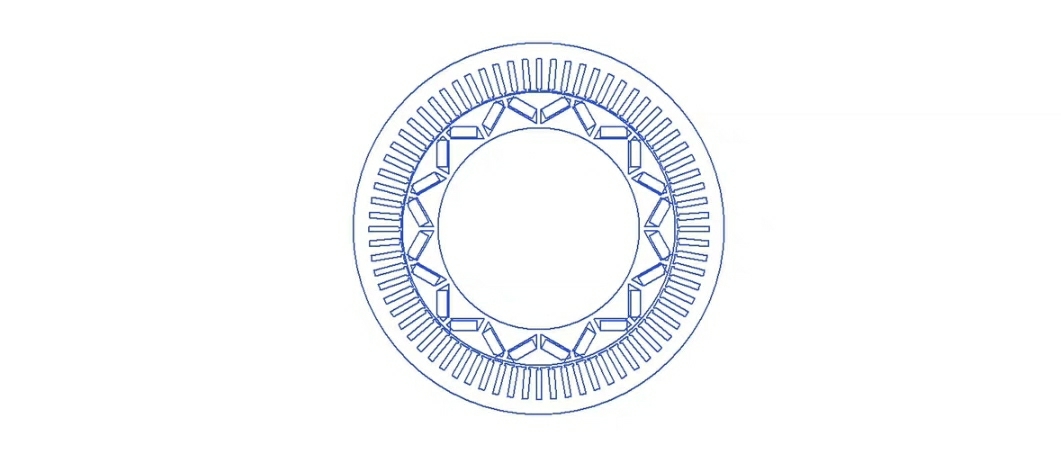
每次双击ANSYS Electronics Desktop图标的时候,总感觉像是要打开魔法工具箱——尤其是处理新能源扁线电机这类高密度怪物。但别急着高兴——涡流损耗马上会教做人,得在材料属性里勾选"Consider Stranding Effects"才能看到真实的交流阻抗。注意看齿槽转矩的波形,当斜极角度达到0.8个槽距时,扭矩脉动会突然跳水。不过这时候磁钢的Halbach阵列可能需要重新调整,
最后说个实战经验:在33节点系统中,储能最优容量配置呈现明显的"两头大中间小"特征。负荷节点处的储能配置量通常是普通节点的3-5倍,而光伏接入点10公里内的储能容量会锐减40%——这说明系统更倾向于就地消纳而非远距离调节。代码仓库里留了个彩蛋:把config.yml中的enable_blackhole设为true,会激活一种新型的粒子群黑洞机制,专门对付局部最优陷阱。这里有个骚操作——用电压幅值平
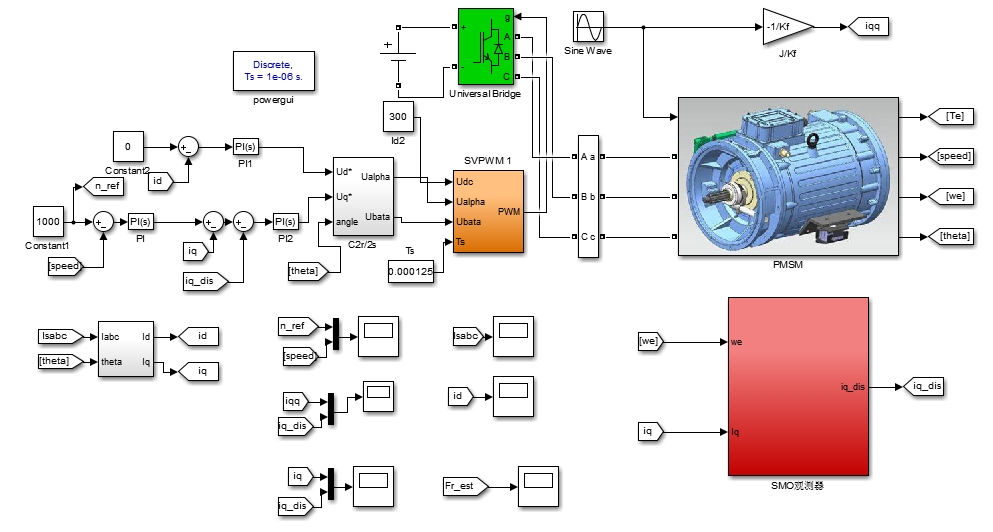
这个代码块藏着三个关键彩蛋:beta控制滑模面倾斜度(相当于老哥的暴脾气程度),k决定怼人力度,sign函数则是祖传的拍砖神器。这个改进就像给老哥配了太极师傅,既保持了怼人的核心态度,又学会了四两拨千斤。Matlab仿真结果显示,突加5N·m负载时转速波动从±30rpm降到了±5rpm以内,电流波形稳得像条直线。这套组合拳打下来,既保持了滑模控制的抗扰特性,又避免了传统方法需要精确数学模型的尴尬。