
写文章




- @Yigonglili
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
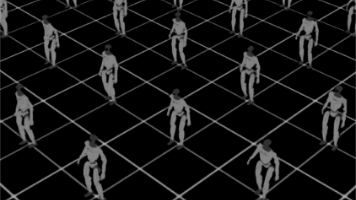
UniTree_rl_lab中垂直原地起跳
本文详细介绍了基于Unitree G1 29自由度机器人的垂直跳跃任务训练流程。主要包括:1) 导入跳跃奖励模块;2) 创建环境配置文件;3) 配置场景、观测、奖励、动作和终止条件,重点使用平坦地形、零速度命令和跳跃高度奖励;4) 注册新环境;5) 测试环境功能;6) 开始训练。配置过程强调跳跃任务特有的参数设置,如基座高度观测、垂直速度奖励和落地检测,同时保留基本稳定性约束。训练采用4096个并
IsaacLab项目安装运行
本文介绍了在Windows系统下安装IsaacLab 5.1及配置机器人强化学习环境的方法。主要内容包括:1)按照官方文档安装IsaacSim 5.1;2)使用Unitree_ros项目提供的URDF格式机器人模型文件(建议使用URDF而非USD);3)配置Unitree_rl_lab强化学习训练环境,需修改项目路径和模型加载方式为URDF;4)详细说明了工作流程,包括环境搭建、模型加载、训练执行
到底了