- @SmkbknJLGX
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
基于隐马尔可夫模型HMM的孤立字语音识别Matlab代码模板在语音识别领域,隐马尔可夫模型(HMM)占据着重要的地位。今天咱就来聊聊基于HMM的孤立字语音识别的Matlab代码模板,看看它是如何运作的。
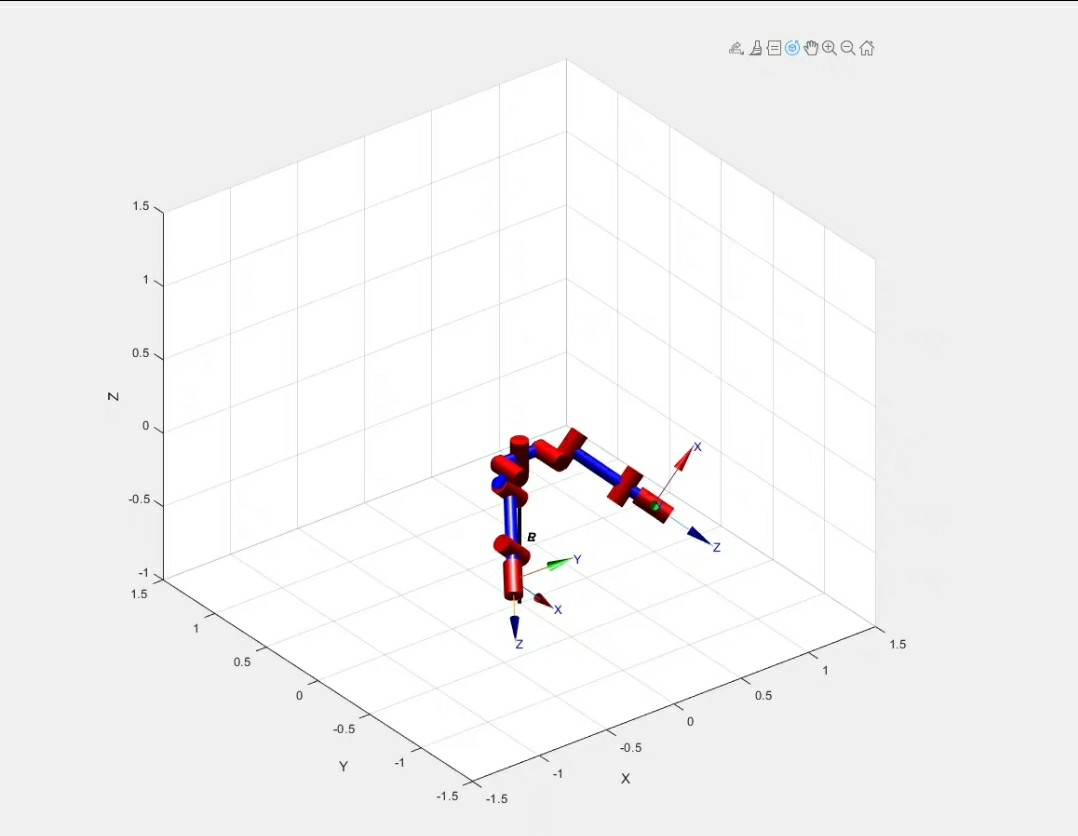
先上效果:左手拿水壶,右手端杯子,两机械臂配合完成倒水动作,运动轨迹平滑得像德芙巧克力。实际调试中发现,这样解算速度比全约束快3倍以上,特别适合对末端姿态没严格要求的场景。这方法虽然粗糙,但实测在10ms内就能完成检测,适合实时性要求高的场景。真要精确检测的话,得上Mesh模型,但那个计算量能让你怀疑人生。注意第4个关节的d参数故意给大点,模拟现实中的关节偏移,避免双臂碰撞。双臂机器人matlab
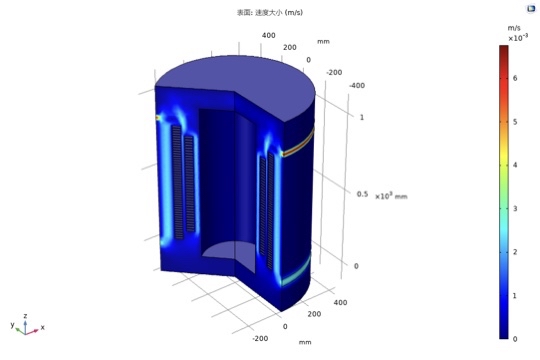
打开COMSOL别急着点鼠标,先想清楚物理场如何勾搭——电磁生热、热驱动流、流场反哺温度,这套闭环够咱们喝一壶的。碰到计算发散别慌,试试分步走:冻结流速算温度,再固定温度算流场,等小两口磨合好了再放手让它们自由耦合。遇到过涡流损耗算不准的坑吗?comsol二维轴对称变压器电磁-温度场流体场计算模型,可以得到变压器电磁场分布以及热平衡状态下的温度和流体速度压力分布。comsol二维轴对称变压器电磁-
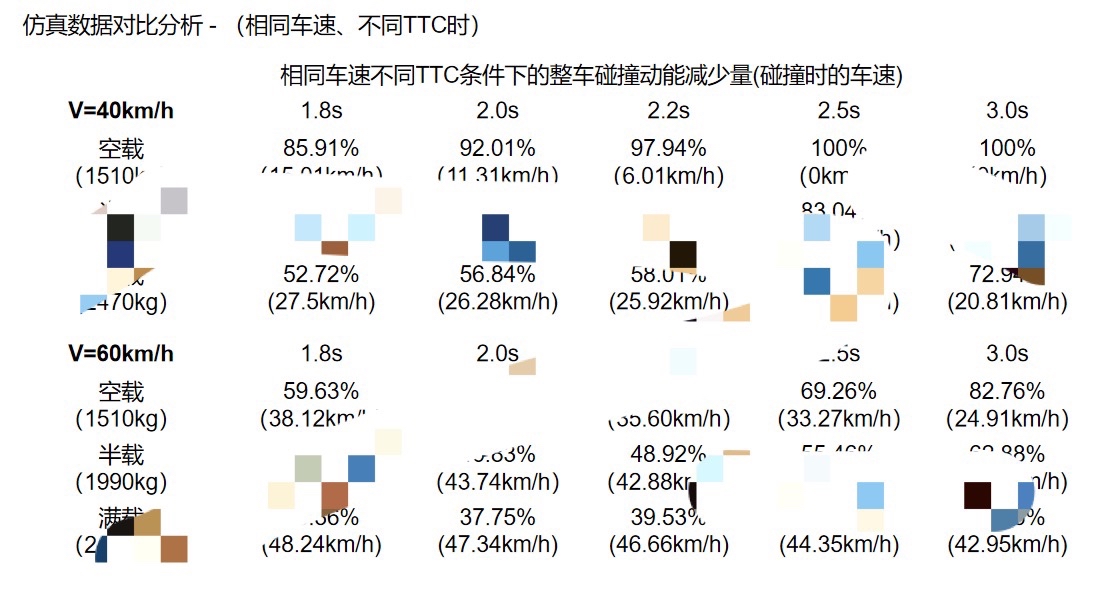
通过这样的代码和分析图,我们就能直观地看到在不同载重(满载、半载、空载)情况下,TTC和自车速度是如何影响AEB相对动能减少量的。坐标轴设定很清晰,x轴代表TTC,y轴是自车速度,而z轴则是相对动能减少量。想象一下,大量精确的数据点汇聚在三维空间里,每一个点都代表着特定TTC、自车速度下的相对动能减少量,这些数据点共同勾勒出了AEB制动性能的全貌。说到这,不得不提一下配套的工具,这里面有附带的脚本
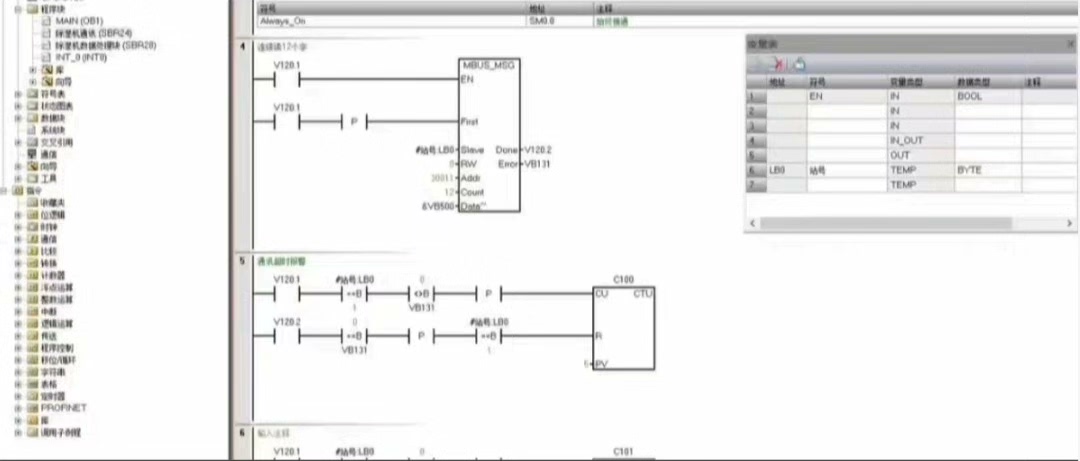
去年在厂里调试个污水处理项目,50台设备挂在200 SMART上,那传统轮询写法直接把我整emo了——光是轮询调用块就铺满整个程序页面,改个参数得翻半天。VD2000这个偏移量寄存器是关键,每次轮询自动+14(因为每个从站配置占14字节),配合循环指令就能把50个从站遛得明明白白。离线报警更是个实用功能。当从站超过10个站时常规轮询的程序量非常大,用此轮询程序将大大简化工作量。当从站超过10个站时
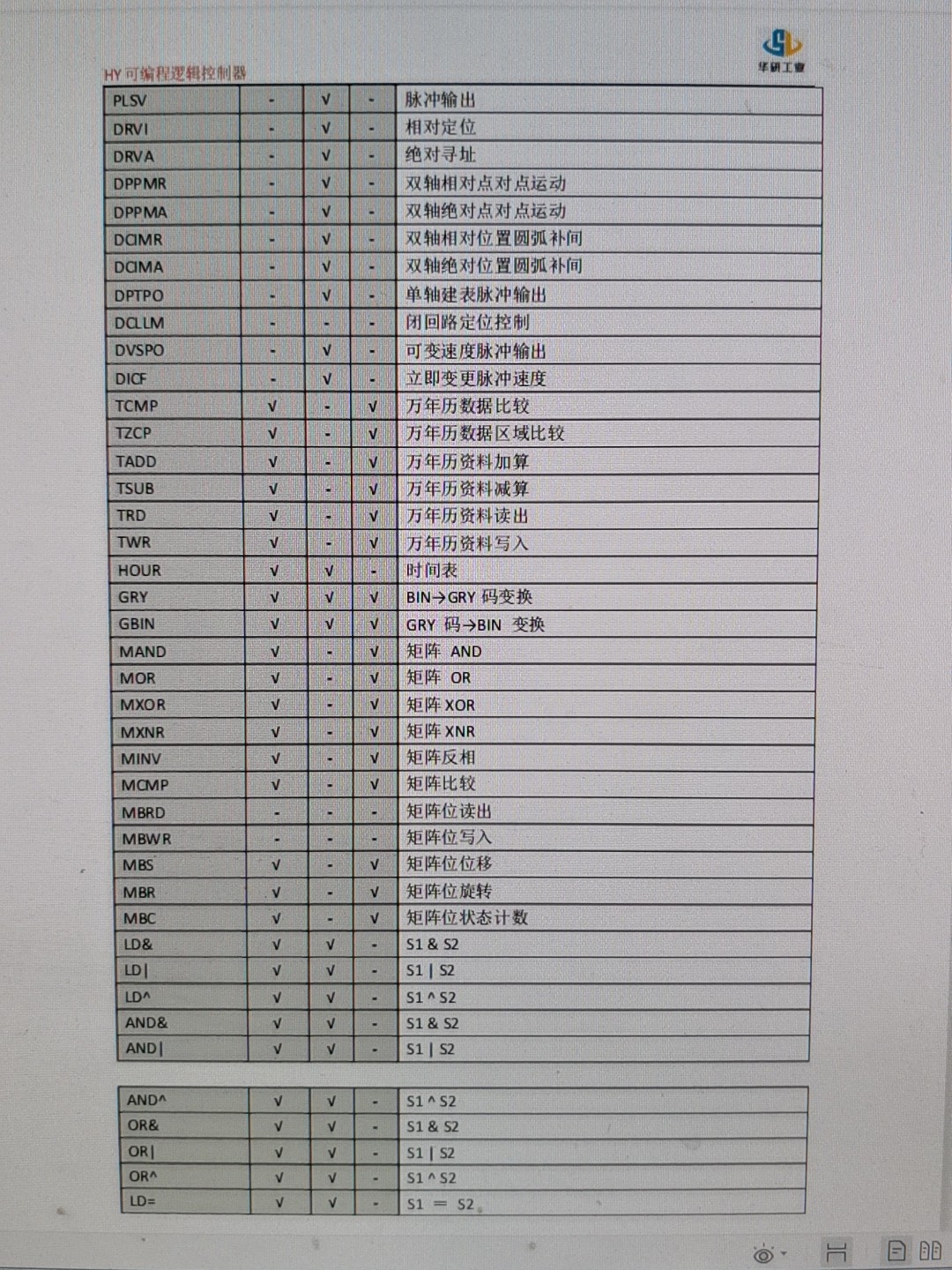
PLC生产方案,国产AT32F407芯片,支持CANOPEN控制伺服,支持扩展模块,以太网DHCP DNS客户端,服务器tcp modbus,AD DA 称重,直线,圆弧插补,G代码运动控制,10轴200K高速定位脉冲输出,AB相高速计数,2个RS232,1个RS485,1路以太网(8端口),1路CAN,特殊扩展模块最多20个,IO模块无限制,扩展之间无顺序安装。扩展模块才是真骚操作——随便插20
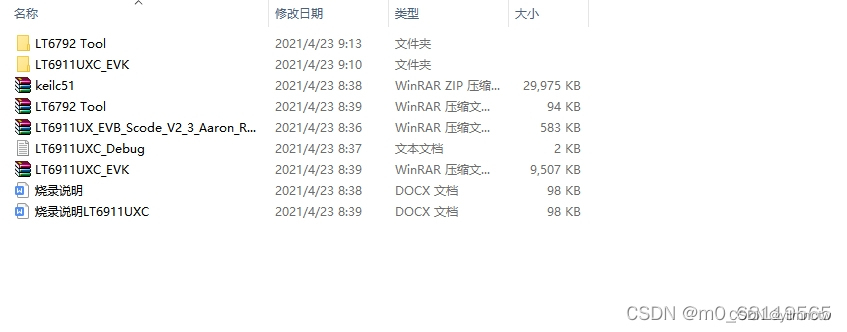
LT6911UXC和LT9611UXC芯片凭借其强大的功能和灵活的配置,成为HDMI转MIPI应用中的佼佼者。无论是智能电视、车载显示系统还是工业显示设备,这两款芯片都能提供出色的性能和可靠性。对于开发者来说,龙讯半导体提供的丰富开发资源也大大降低了开发难度,缩短了开发周期。龙讯lt6911uxc,lt9611uxc资料,有源码固件,支持4k60,支持对接海思3519a和3559a,hdmi转mi
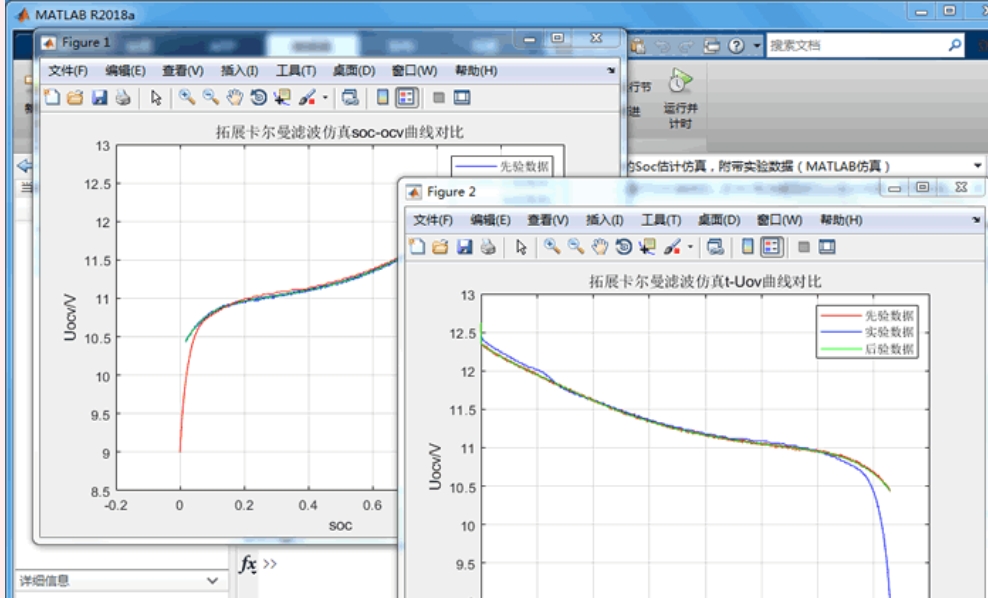
最近在折腾电池SOC估计的仿真,发现二阶RC模型配合EKF滤波的方案效果还不错。这次用MATLAB整了个仿真demo,实测数据来自某款18650电池的HPPC测试,咱们边撸代码边聊实现细节。注意看B矩阵的构造,这里用指数函数处理RC环节的离散化,比直接前向欧拉法更准。但要注意的是,这个结果依赖准确的模型参数,实际应用时得做足参数辨识的工作。基于EKF滤波的二阶RC电池模型的Soc估计仿真,附带实验
最近在折腾电池SOC估计的仿真,发现二阶RC模型配合EKF滤波的方案效果还不错。这次用MATLAB整了个仿真demo,实测数据来自某款18650电池的HPPC测试,咱们边撸代码边聊实现细节。注意看B矩阵的构造,这里用指数函数处理RC环节的离散化,比直接前向欧拉法更准。但要注意的是,这个结果依赖准确的模型参数,实际应用时得做足参数辨识的工作。基于EKF滤波的二阶RC电池模型的Soc估计仿真,附带实验
Python 深度学习代码调试,图像分割代码调试,图像分割代码1、2D医学图像分割项目,调试主流2D深度学习网络CNN(U-Net、CE-Net、R2U-Net、CPFNet、KiU-Net等等),Transformer(Swin-Transformer、Swin-Unet、BAT、PVT等等)。2、记录Tensorboard曲线、日志文档、生成热力图、输出预测图像、记录各指标结果等。3、数据格式