- @SSSlasH
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
最近看了一篇大佬写关于正负样本区分和平衡策略的博文,研究了一下并且查了一下资料进行了补充,加上个人的见解和解读,在此做个总结,欢迎大家补充指正,侵权立删。大佬博文:目标检测正负样本区分策略和平衡策略总结(一) - 知乎目标检测正负样本区分策略和平衡策略总结本文抛弃网络具体结构,仅仅从正负样本区分和正负样本平衡策略进行分析,大体可以分为正负样本定义、正负样本采样和平衡loss设计三个方面,主要是网络

voc旋转标注数据转dota类型python脚本HBB、OBB转poly脚本
最近看了一篇大佬写关于正负样本区分和平衡策略的博文,研究了一下并且查了一下资料进行了补充,加上个人的见解和解读,在此做个总结,欢迎大家补充指正,侵权立删。大佬博文:目标检测正负样本区分策略和平衡策略总结(一) - 知乎目标检测正负样本区分策略和平衡策略总结本文抛弃网络具体结构,仅仅从正负样本区分和正负样本平衡策略进行分析,大体可以分为正负样本定义、正负样本采样和平衡loss设计三个方面,主要是网络
CVPR2022: Oriented RepPoints论文模型实践(用dota数据集)论文:https://arxiv.org/abs/2105.11111github:https://github.com/hukaixuan19970627/OrientedRepPoints_DOTADOTAv2遥感图像旋转目标检测经验分享(Swin Transformer + Anchor free/bas
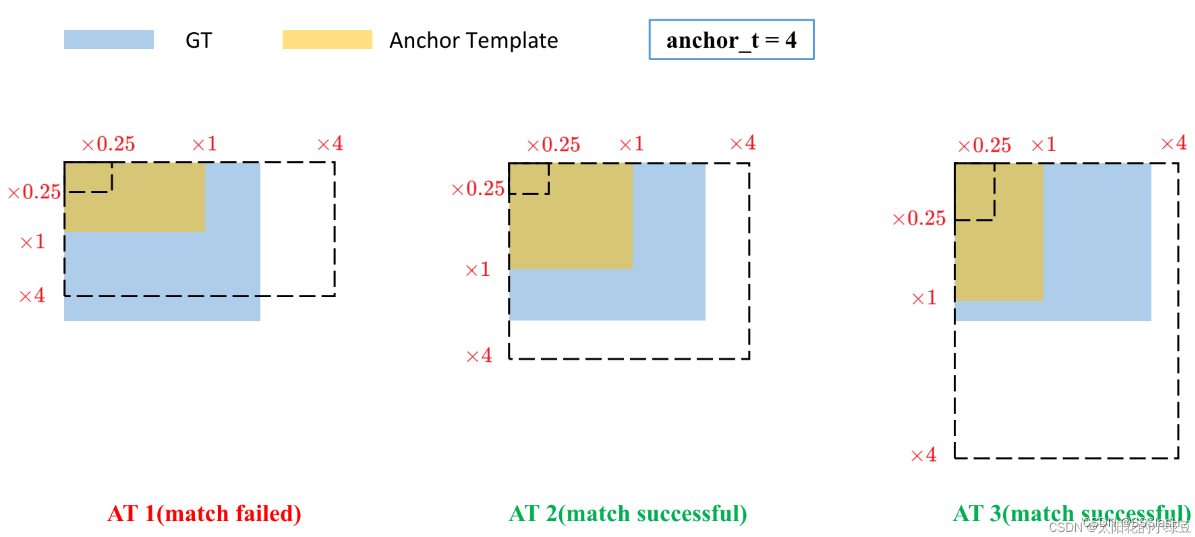
总体来说,理解anchor-base正负样本匹配策略的关键,其实就是要搞清楚特征图上的grid网格,每个网格都会有预设的anchor,基于anchor与gtbox的iou阈值来定义正样本,只有理解了就很简单,其他anchor-base的方法也是大同小异。因为网络预测中心点的偏移范围已经调整到了( − 0.5 , 1.5 ),所以按理说只要Grid Cell左上角点距离GT中心点在(−0.5,1.5