- @Robotway
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
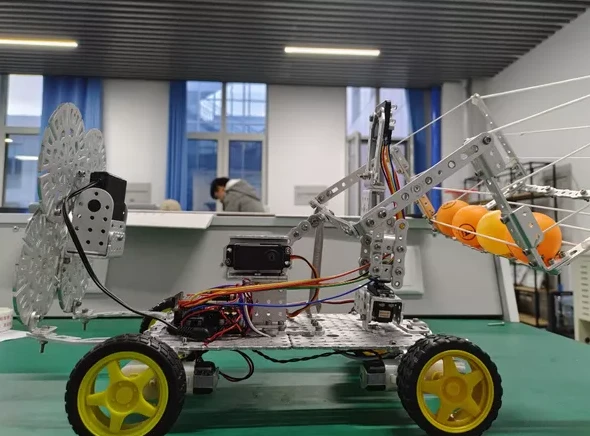
本文示例将实现R281b样机杠杆式6轮爬楼机器人爬楼梯的功能。

机器人正前方有一个超声波测距模块,用来感测小球方位,以及实现对球与小车距离的调整,超声波测距模块的正上方安装一条灵活多变的机械手臂,用于实现对乒乓球等球类的灵活抓取,同时小车后方安装一个收纳盒,用于存放已拾起的小球。本作品在设计好捡球代码并调试完成之后,又进一步采用了NRF模块堆叠Birdmen 手柄扩展板,再加上Barsa板,组成一个遥控器,在环境干扰较大以及捡球过程中遇到突发意外时,可以通过遥

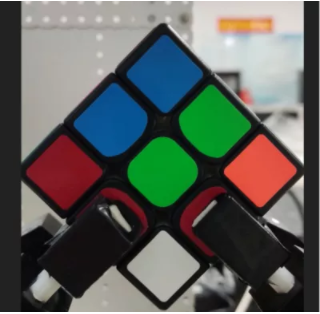
双臂二指魔方机器人是一个融合了机器人视觉、图像处理技术、机器人控制技术和魔方还原算法等多学科知识的机电一体化设备。
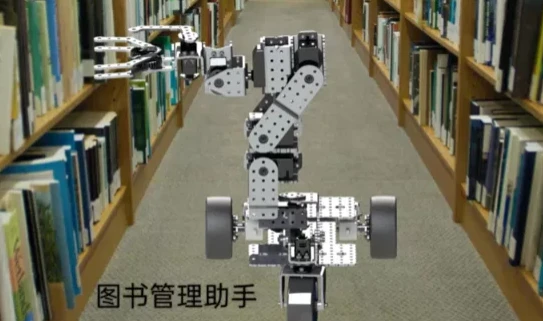
图书馆作业的自动化和智能化,能够从根本上减轻图书馆员的劳动强度、提高工作效半,尤其适用于采用闭架借阅图书的图书馆。随着中国公共图书馆图书流通人次的增加,书刊文献外借册次也随之增长,2019年中国公共图书馆书刊文献外借册次达61373万册次,较2018年增加了3363万册次,同比增长5.80%,2020年受新冠肺炎疫情影响,中国公共图书馆书刊文献外借册次大幅下滑,2020年中国公共图书馆书刊文献外借
智能消防机器人基于全向移动底盘、多连杆机构、视觉识别、液压传动等方式,可实现自动巡检,自动识别火源,自动灭火等功能。 本作品主要由识别单元,运动单元,灭火单元组成,由探索者套件为主体拼装而成。

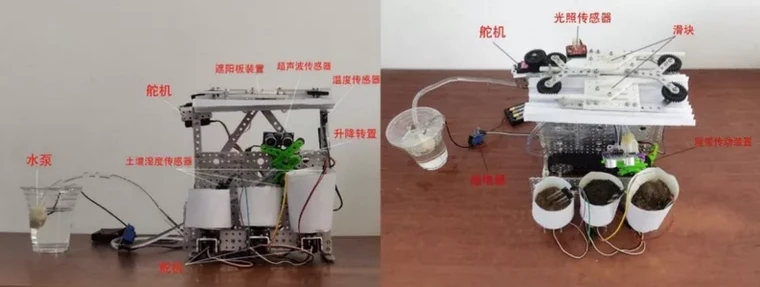
近年来,人们越来越注重生活品质的提高,越来越多人喜欢在家庭、办公室内培养盆栽植物,但因差旅现象和养护经验不足等问题,很多人难以为盆栽植物提供适宜的生活环境。因此,自动化,智能化的养护变得尤为重要。智能浇花机器人是一种针对室内盆栽植物的浇灌养护问题的智能装置。我们通过总结市场上的浇花机器人的经验与缺点,制作了一款以增强机器人的普适性,科学用水为目的智能浇花机器人。该装置可以在无人监督、无人操作的条件
② 开始的时候,我们的机器人捡取部分的框子设计的并没有这么大,我们的初衷也是减轻其捡取部分的质量,但是这导致了捡取成功的几率并不高,而且在捡取的时候其效果并没有达到我们想要的效果,所以我们后期更换了捡取部分的框子,使其底面工作面积大大增加,并且可以达到同时最多捡四个球的效果,并且改良后的框子捡球的成功率非常高。③ 最后可是适量加大加深捡取机构的框子,使其容量增加,可是一次性容纳更多的乒乓球,避免频
消毒是疫情防控工作中的重要一环,传统的消毒方式需要人工操作消毒设备,不仅工作量大,且一些消毒剂会对人体造成伤害,消毒机器人便成了代替人工的不二之选,因此开发一款能够搭载多种消毒设备的消毒机器人控制系统对疫情防控具有重要意义。

针对校园巡检需求设计机器人本体结构,借助Arduino作为控制核心的巡检机器人控制系统构建方法研究了巡检机器人在校园环境下的导航、控制、多传感器融合等问题。
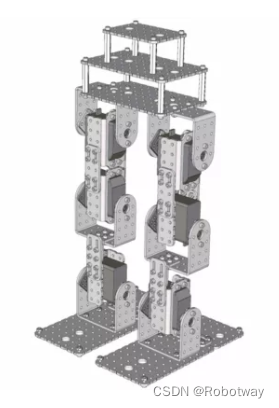
控制6自由度双足机器人样机腿部舵机协调运动,使样机做出翻跟头的动作。