
写文章




- @ROS_homes
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
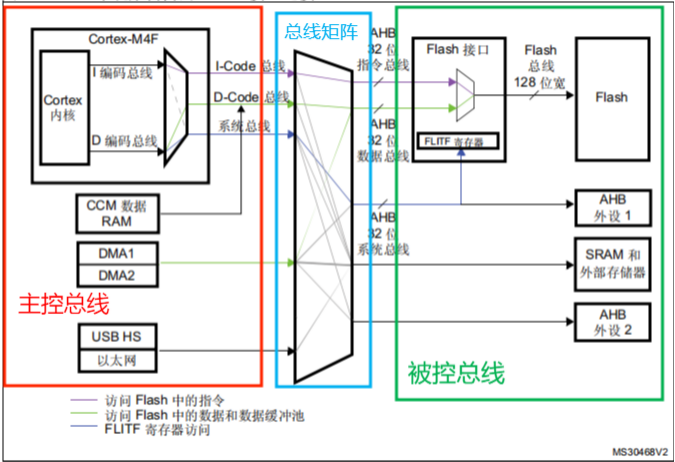
搭建机器人电控系统——MCU基石——STM32系统架构
搭建机器人电控系统——MCU基石STM32系统架构STM32时钟配置GPIO是什么中断NVIC与EXTISTM32系统总线架构在对应STM32F4的《参考手册》中,有如下一个系统架构图:从整体来看,STM32系统借助总线矩阵,实现主控总线到被控总线的访问。主控总线①Cortex内核I、D、S总线Cortex-M4:ARM制定的一种内核协议。在选择主控章节说过,ARM制定内核协议,由ST公司根据内核
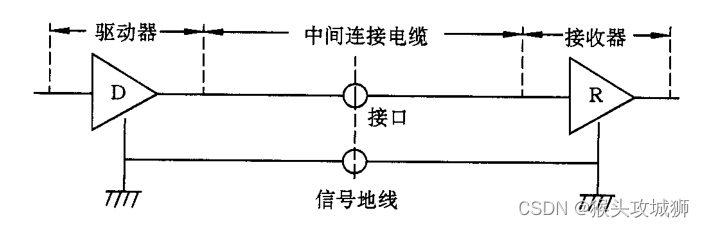
现场总线技术笔记——3、通用串行端口的数据通信(RS232、RS485)
文章目录串行通信PC和单片机之间的通讯转换RS232RS485串行通信关于串行通信的前序知识在之前的博客中提到:串口通信IIC通讯SPI通讯接下来会着重讲解RS232和RS485的部分RS232和RS485同属于异步串口通信,在前序部分讲过,他们在程序上的写法都是一样的,区别在于物理上的发送和接收器需要经过特定的电平转换。RS232:逻辑“1”:-5V~-l5V逻辑“0”:+5V~+l5V转换芯片
搭建机器人电控系统——通信协议——串口通信USART/UART、RS232、RS485及其实例
通信协议计算机与外界的信息交互称为通信。基本的通信方式分为两种:串行通信:所传送的数据各位按顺序一位一位地发送或接受,占用资源少,速度相对较慢。并行通信:所传送的数据的各个位是同时发送或接受。速度快,占用引脚资源多。通信的速率:比特率(bit rate):每秒能传输的二进制位数。波特率(Baud rate):每秒能传输的码元数(不一定是二进制)。对于数字信号而言,波特率=比特率。串行通信的种类:同

到底了