- @QQ_2193276455
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文研究了智能导航系统的远程通信关键技术,提出"终端-边缘-云端"三层协同架构,采用多协议混合传输方案(TCP/IP、UDP、MQTT、DDS)实现不同场景下的数据交互。针对定位精度问题,开发了基于远程通信的多源数据融合技术,将定位精度提升至厘米级。同时研究了抗干扰、低时延和通信安全技术,包括多链路冗余、边缘计算卸载和轻量级加密算法,有效解决了复杂环境下的通信中断和信息安全问题
本文设计了一种基于单片机的智能雨刷控制系统,通过雨滴传感器实时检测车窗覆水量,结合语音识别模块实现雨刷转速的自动调节。系统硬件采用STC89C52单片机为核心,配合LCD显示、键盘输入、LD3320语音识别等模块;软件使用Keil开发环境进行C语言编程,实现覆水量阈值判断和语音指令控制功能。测试表明,该系统能有效降低驾驶员因手动操作雨刷导致的分心风险,提升雨天行车安全性。研究指出了当前系统在识别精
本文设计了一种基于深度学习的手语孤立词实时检测识别翻译交互系统,旨在解决听障人群与健听人群的沟通障碍。系统采用"端侧实时处理+云端辅助优化"的混合架构,通过YOLOv8n+3D-CNN+LSTM模型实现手语孤立词的实时检测(延迟≤80ms)和高精度识别(准确率≥95%)。系统支持多场景适配、文字/语音双向翻译和自定义词库功能,已在家庭、政务等场景测试中表现良好。未来将扩展至连续
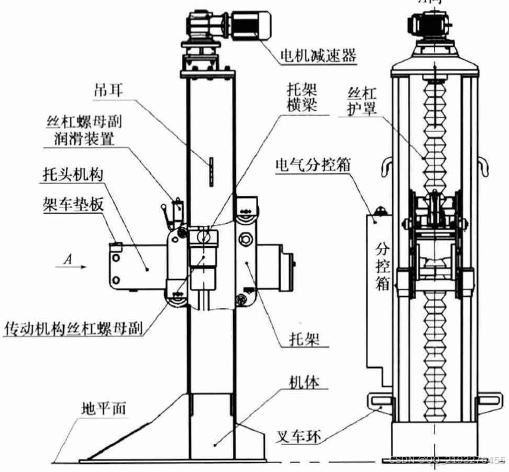
架车机作为列车检修的最常用的设备这一,它的总体尺寸在检修过程中是关系到检修过程中的列车的举升高度以及在使用过程中的安全问题,其中机架总体尺寸最关键的地方就在于架车机机架截面尺寸的设计,好的截面尺寸,不仅能够更好的承载力,有更高的强度与刚度,并且拥有良好的稳定性,而且能够最大程度的减轻架车机的重量,减少架车机在移动过程中的工作强度[15]。(5)对架车机的安全装置进行了设计,在设计架车机的安全装置时
本文针对工业级大幅面印刷需求,设计了一种大型平板喷绘机。该设备采用龙门式固定床结构,有效喷绘宽度2400mm,定位精度±0.01mm。通过伺服电机驱动、精密导轨导向和同步带传动,实现高速平稳运动。关键部件采用箱型铝合金横梁和钢管焊接机架,经有限元分析验证其刚性。设备配备多喷头模块、真空吸附平台和智能供墨系统,支持60m²/h的喷绘速度。测试表明该机具有高精度、稳定性强等优势,适用于广告、建材、家电
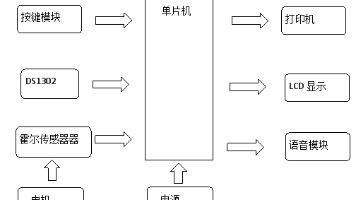
本文设计了一款基于51单片机的低成本出租车计价器,采用STC89C52RC单片机作为主控,通过霍尔传感器实现车轮转速脉冲信号采集,结合脉冲计数法和多维度计费算法,实现里程计量误差≤±0.08km、费用核算误差≤±0.05元的高精度计价。系统支持起步价、里程单价、等候费和夜间加价等参数设置,具备防干扰、防篡改设计,成本仅80元,安装便捷,适用于中小城市出租车改装升级。测试表明,该系统运行稳定,计量精
本文设计了一种基于AT89C51单片机的被动式红外防盗报警系统。系统采用热释电红外传感器检测人体信号,通过单片机处理驱动声光报警电路。硬件设计包括单片机控制电路、人体感应模块、报警电路和LED指示电路;软件部分采用Keil μVision4开发环境,实现信号检测、处理和报警控制功能。系统测试表明,该设计具有功能完整、电路简单、成本低廉的特点,适用于家庭防盗应用。虽然存在一些待改进之处,但为防盗报警
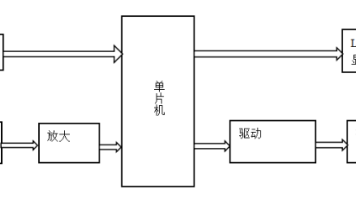
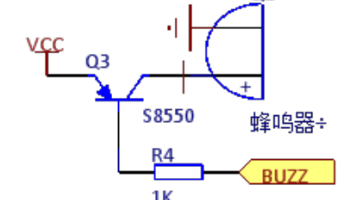
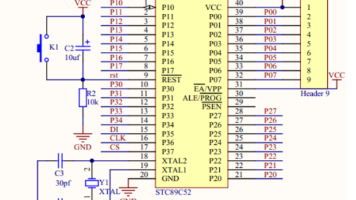
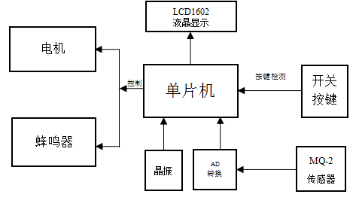
本文设计了一种基于STC89C52单片机的可燃气体检测系统。系统通过MQ-2传感器检测环境气体浓度,经AD转换后由单片机处理,与预设门限比较后控制报警装置(蜂鸣器和电机)。硬件设计采用Altium Designer完成电路板绘制,软件采用Keil环境进行模块化编程。系统实现了气体浓度实时显示、报警门限可调等功能,经测试验证能可靠检测可燃气体并触发报警。该系统具有实用性强、成本低廉等特点,适用于环境
本文设计了一款基于单片机的智能晾衣架控制系统,具有手动和自动两种控制模式。系统通过光敏电阻和雨滴传感器检测环境光照和降雨情况,由STC89C52单片机控制步进电机实现晾衣架的自动伸缩。在自动模式下,系统仅在晴天且光照充足时展开晾衣架,其他情况自动收回衣物。硬件设计采用模块化方案,软件基于Keil C51开发环境编写控制程序。测试结果表明,该系统具有体积小、重量轻、智能化程度高、操作便捷等特点,能有
摘要:本文设计了一款基于51单片机的低成本智能门锁系统,采用STC89C52RC主控芯片,集成密码键盘和AS608指纹模块实现双验证方式。系统具备权限管理、异常报警(3次错误锁定)、防撬检测等功能,电磁锁响应时间≤0.5s,指纹识别率≥98%。测试显示设备在-10℃~45℃稳定运行,待机≥30天,核心成本仅120元,较传统门锁安全性提升90%,成本降低70%。该系统支持直接改装传统门锁,适用于住宅