- @QQ27699885
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
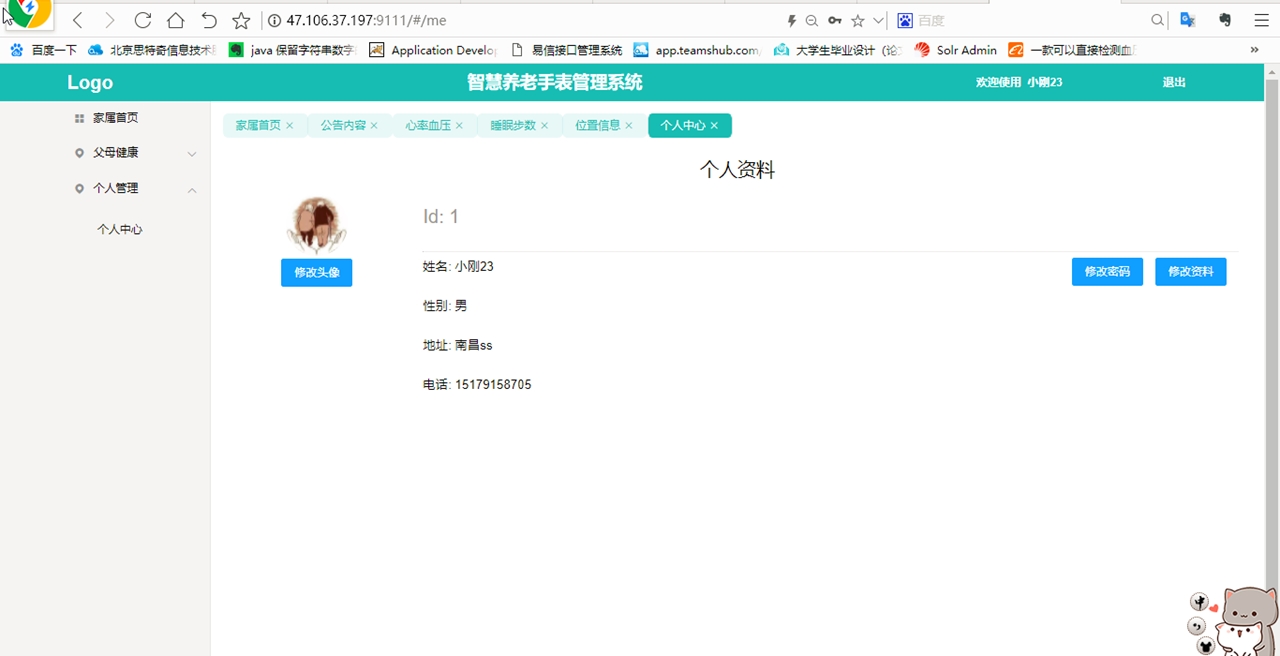
后台门户则面向运营商、社区医生、家属三类角色,提供设备管理、数据可视化、报警闭环、电子围栏、用药提醒、远程固件升级等完整功能。智慧养老手表管理系统通过“SSM + Vue”的经典组合,配合 MQTT、InfluxDB、Redis、Flink 等开源组件,构建了一套高可用、可扩展、安全合规的 IoT 后台门户。模板使用 FreeMarker 渲染,支持多语言、夜间静默期。功能有:个人管理,公告管理,
ECU ccp协议上位机测试与标定源码,C#源码上位机ECU标定与测量程序。- ASAM MCD -1MC的 ccp 标定与测量上位机软件,短上传和DAQ功能,支持一维二维等测量和标定,显示控件丰富,具有仪表盘,进度条,二维map等。- ASAM MCD-2MC 的文件读取(a2l文件读取)- 在解析的同时提供了文件结构检查- 读取和导出ECU 测量数据为excel文件。
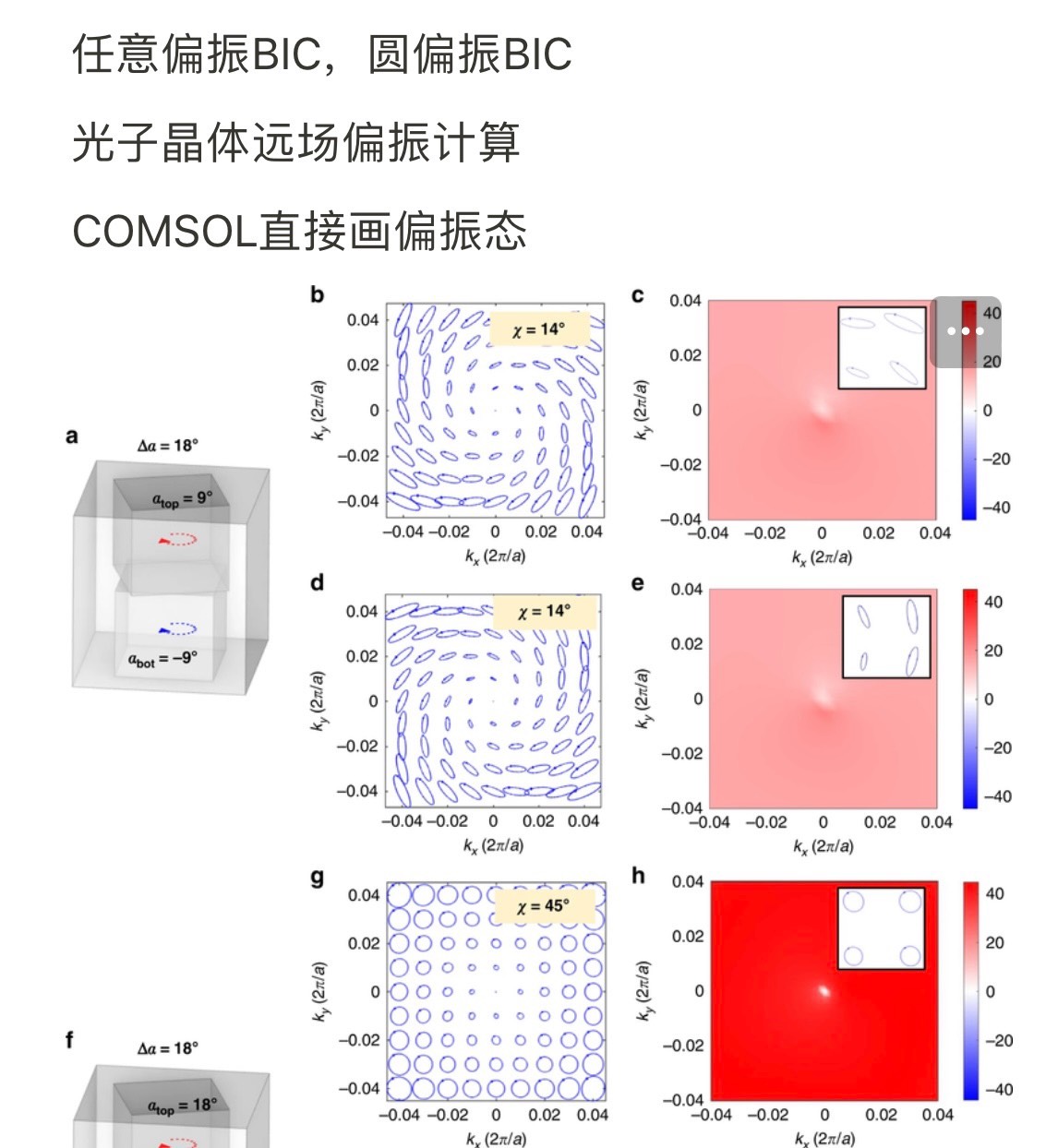
而偏振BIC,顾名思义,就是和光的偏振状态有关的BIC。圆偏振BIC则是其中一种特殊形式,光的偏振是圆形的。总的来说,用COMSOL直接画偏振态还是挺方便的,尤其是对于研究BIC这种复杂的光学现象。最近在研究任意偏振BIC(Bound states in the continuum)和圆偏振BIC光子晶体的远场偏振计算,发现用COMSOL直接画偏振态还挺有意思的。这段代码首先计算了远场的电场分布,
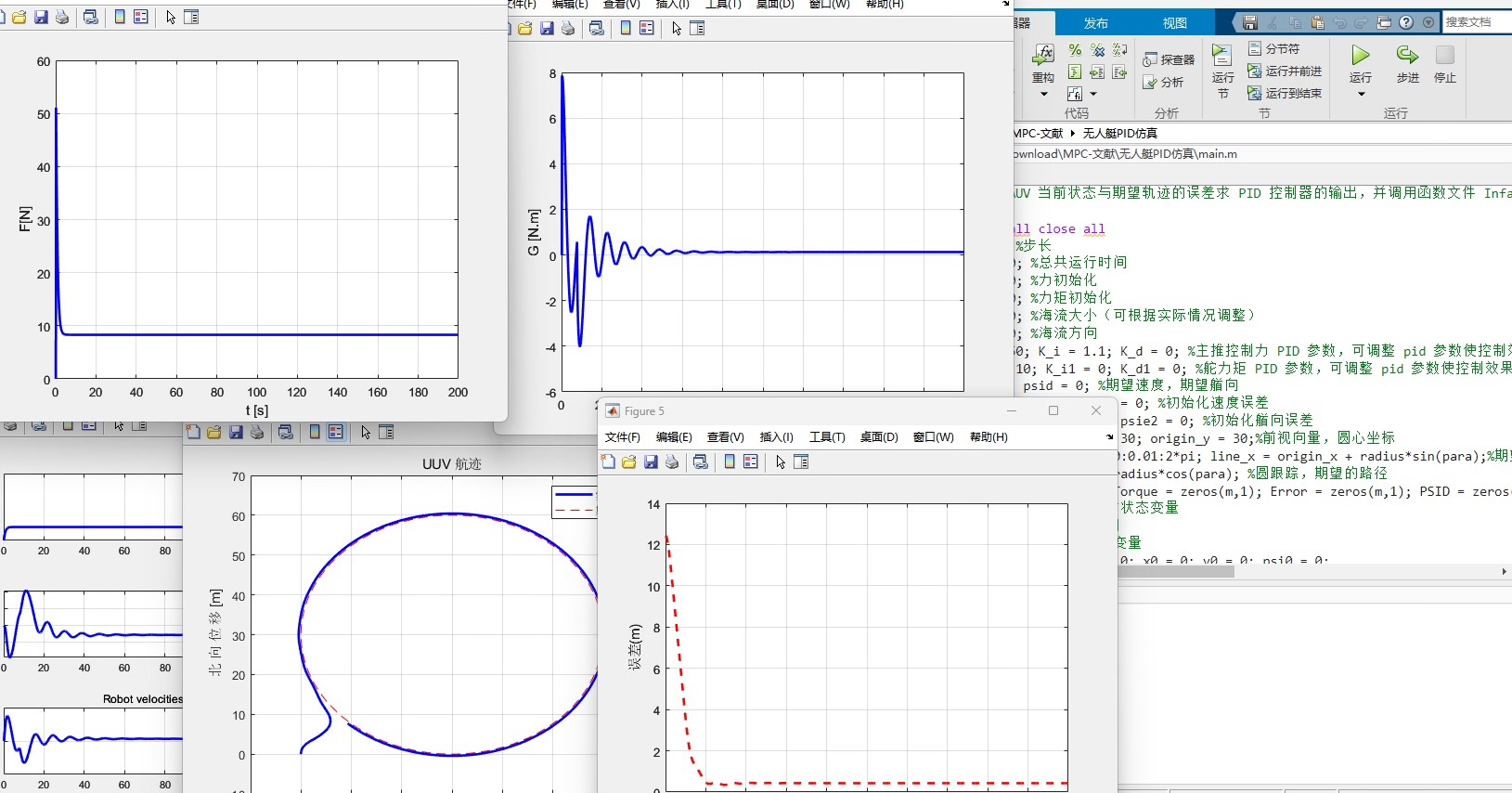
从响应曲线能看出增量式的"小步快跑"特点,相比位置式PID,虽然跟踪精度略低(约5%),但控制量抖动减少了60%,这对执行机构寿命更友好。对比传统PID的位置式算法,增量式最大的特点是只计算控制量的变化值。今天咱们直接上干货,用MATLAB整了个AUV三自由度运动模型,重点聊聊增量式PID在路径跟踪里的骚操作。特别是水下机器人,积分项太大会导致螺旋桨频繁启停,实测把Ki控制在Kp的1/300到1/
总之,VCU的设计是一个系统工程,硬件、软件、通信、电源管理,样样都得考虑周全。不过,真正的挑战还是在于如何把这些技术整合到一起,打造出一款稳定、可靠、高效的VCU产品。商用车的VCU设计,绝对是一场硬仗,但也正是这种挑战,让汽车电子工程师们乐此不疲。商用车的VCU设计,既要考虑功能的完备性,还得兼顾可靠性和成本。首先,CAN总线是汽车电子通信的“大动脉”,负责VCU与其他模块的数据交换。这款芯片
X射线底片焊缝缺陷检测数据集。3019张,尺寸512×512。图像分割任务。最近在研究图像分割相关项目时,接触到了一个很有意思的数据集——X 射线底片焊缝缺陷检测数据集。这个数据集共有 3019 张图像,每张图像的尺寸均为 512×512,主要应用于图像分割任务,旨在准确识别焊缝中的缺陷。
三维弯曲的光纤仿真总是让人头大——传输模式扭曲得像麻花,损耗突然飙升,模场分布更是难以捉摸。对比FDTD方法时发现,虽然FDTD能更好处理大角度弯曲的辐射损耗,但计算三维结构需要恐怖的网格量。波束包络法在内存占用上优势明显——同样的光纤模型,FDTD需要32GB内存,而COMSOL只用8GB就能跑。求解时建议开启"渐进扫描"功能,先计算直波导模式,再逐步增加弯曲角度。我的解决方案是先建立直波导段,
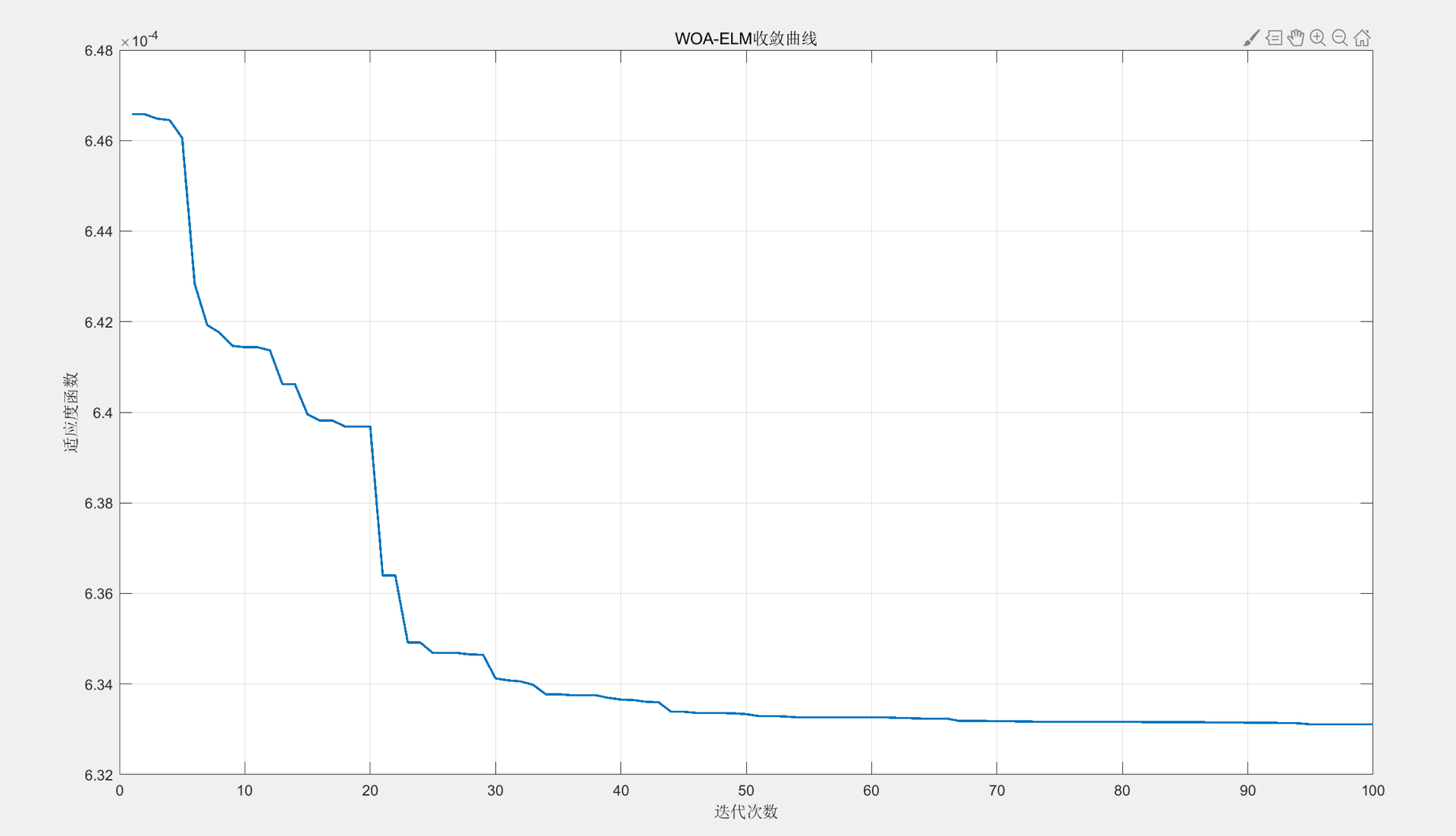
极限学习机是一种单隐层前馈神经网络,它在训练过程中只需要设置输入层与隐含层之间的连接权值和隐含层神经元的阈值,且这些参数可以随机生成。输出层的权值通过最小二乘法直接计算得到,这大大减少了训练时间。以下是简单的ELM代码示例(以Python为例,借助numpyclass ELM:return Y这里ELM类的init方法初始化了输入层大小、隐藏层大小和输出层大小,并随机生成输入层到隐藏层的权值W和隐
MATLAB车辆工程仿真分析+模型搭建SIMULINK离线仿真,软件在环传统汽车总成设计指导汽车电子系统设计指导新能源汽车设计指导MATLAB软件车辆工程咨询文句润色,三维建模,M函数,模糊控制等等教学指导嘿,各位车迷兼技术控们!今天咱来聊聊MATLAB在车辆工程里的那些超酷应用,从模型搭建到各种仿真分析,简直就是车辆工程的“秘密武器库”。
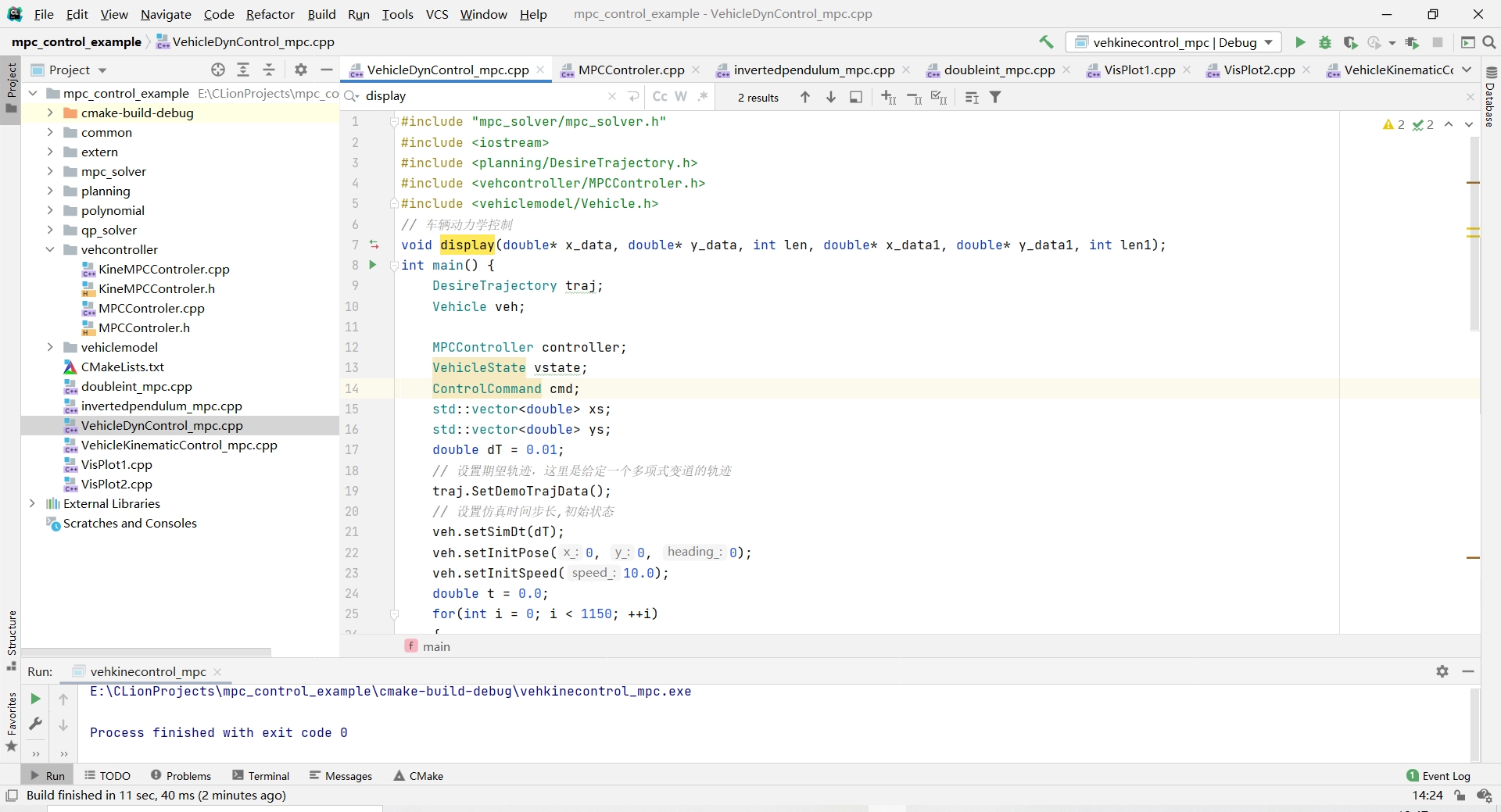
mpc模型预测控制从原理到代码实现mpc模型预测控制详细原理推导matlab和c++两种编程实现四个实际控制工程案例:双积分控制系统倒立摆控制系统车辆运动学跟踪控制系统车辆动力学跟踪控制系统包含上述所有的文档和代码。模型预测控制(Model Predictive Control, MPC)是一种先进的控制策略,它通过求解有限时域内的最优控制问题来实现系统的控制目标。本文基于MATLAB实现的多个M