




- @PNP_Robotics
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
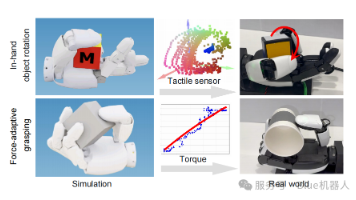
人手依靠触觉与肌肉力矩协同调节握力,既能轻拿易碎物品,也能在掌心灵活转动物件。长期以来,仿真训练的机器人手部控制策略很难直接用于实体设备,高密度触觉感知计算量大、力矩传感硬件造价高,精细力度操控一直难以规模化落地。字节跳动 Seed 团队打造一套触觉 + 力矩融合强化学习虚实迁移完整框架,全部训练流程在仿真环境内完成,无需实体设备调试,可直接部署 ROBOTERA 星动纪元 xHand 12 自由
当下具身智能赛道热度持续走高,大量模仿学习、机器人遥操作、真机数据集采集项目卡在硬件适配、力控同步、末端执行器联动等环节,零散采购机械臂、力反馈设备、灵巧手、视觉套件不仅调试周期长达数月,还极易出现协议不兼容、数据不同步、力控延迟等致命问题。Blue机器人作为七轴力控机器人官方合作伙伴,深耕具身智能全套科研硬件方案多年,推出集成七轴力控机械臂、力反馈遥操作主手、Robotiq灵巧手、高速视觉采集套

Franka机器人中国业务全新启航,一文掌握归来的力控机器人最新产品和趋势
在具身智能飞速发展的今天,高质量的人类操作数据已然成为机器人精细操控、模仿学习及强化学习训练的关键支撑。Blue 机器人依托国际顶尖的 MANUS 数据手套,构建了从人体手部动作实时捕捉到机器人灵巧执行的一体化完整解决方案,帮助科研与工业领域高效搭建数据闭环体系。MANUS 数据手套作为全球领先的手部动作捕捉设备,凭借高精度感知、全自由度采集与高稳定运行等特点广受认可。

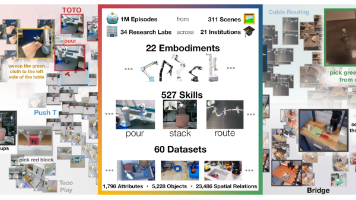
它包含 100 多万条真实机器人轨迹,涵盖 22 个机器人实例,从单臂机器人到双手机器人和四足机器人。在不同数据集上训练的大型高容量模型在有效处理下游应用方面取得了显著成功。在从 NLP 到计算机视觉等领域,这导致了预训练模型的整合,通用预训练主干成为许多应用的起点。这种整合可以在机器人技术领域发生吗?传统上,机器人学习方法会为每个应用程序、每个机器人甚至每个环境训练一个单独的模型。能否训练“通用
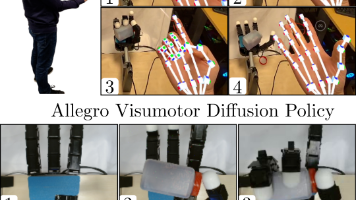
基于视觉运动扩散策略,搭建一套融合增强现实(AR)遥操作、运动重定向、异常演示筛选与多模态感知输入的灵巧手操控框架。以四指 Allegro 灵巧手为硬件平台,完成单手机器人自主拧瓶盖典型精细操作任务。依托 Meta Quest 3 AR 头显实现实时人手追踪与直观遥操作,结合逆运动学与运动重定向解决人手与机器人灵巧手运动学异构问题;采用 HDBSCAN 聚类与 GLOSH 全局 - 局部异常评分算
Kinova自研Kortex控制系统,是其成为全球科研标配设备的关键。系统原生兼容ROS2、Python、C++、MATLAB、MoveIt等所有主流机器人开发框架,底层控制协议、SDK完全对外开放,开发者可自由修改控制参数、适配算法模型、开发定制化功能。设备末端配备标准化法兰接口,可快速替换深度视觉相机、力矩传感器、灵巧夹爪、各类检测模组,拓展性极强。
本次仿真实验采用Shadow Dexterous Hand标准仿真灵巧手。该灵巧手拥有20个主动自由度,关节排布高度模仿人手结构,能够实现五指独立运动与多关节协同联动。仿真环境包含物体位姿调控、纯姿态旋转、指尖到达等四类操作任务,任务目标随机生成,用于模拟多目标作业场景。仿真观测数据包含关节角度、角速度、物体姿态四元数以及指尖位置,为算法训练提供完整的高维状态信息。该平台是灵巧手智能控制领域通用的
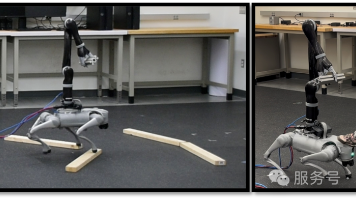
在四足机器人与机械臂协同作业的研究与工程应用中,当机械臂质量较大、动力学特性不可忽略时,传统控制框架往往因为模型过度简化,导致整机在行走、操作、负载、抗扰等场景下出现步态抖动、重心偏移、跟踪精度下降甚至失稳倾倒。本文基于最新学术论文成果。该框架最大的贡献在于,在不忽略机械臂动力学的前提下,通过模型分解与双层实时控制架构,实现四足本体与 Kinova 机械臂的稳定、高效、鲁棒协同。
Franka机器人具备高精度的七轴力控和触觉感知系统,这使得它能够在复杂的物理环境中进行细腻的操作,而这对于生成式模型训练具有优势。:生成式模型训练中需要机器人自主操作、复杂任务规划和人机协作等领域,Franka机器人因为精准的力控与触觉感知,高精度的七轴力控和触觉感知系统,这使得它能够在复杂的物理环境中进行细腻的操作。其安全性设计(如碰撞检测)也确保了医疗操作中的安全。:Franka机器人常用于
