- @NYTfewcsrZ
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
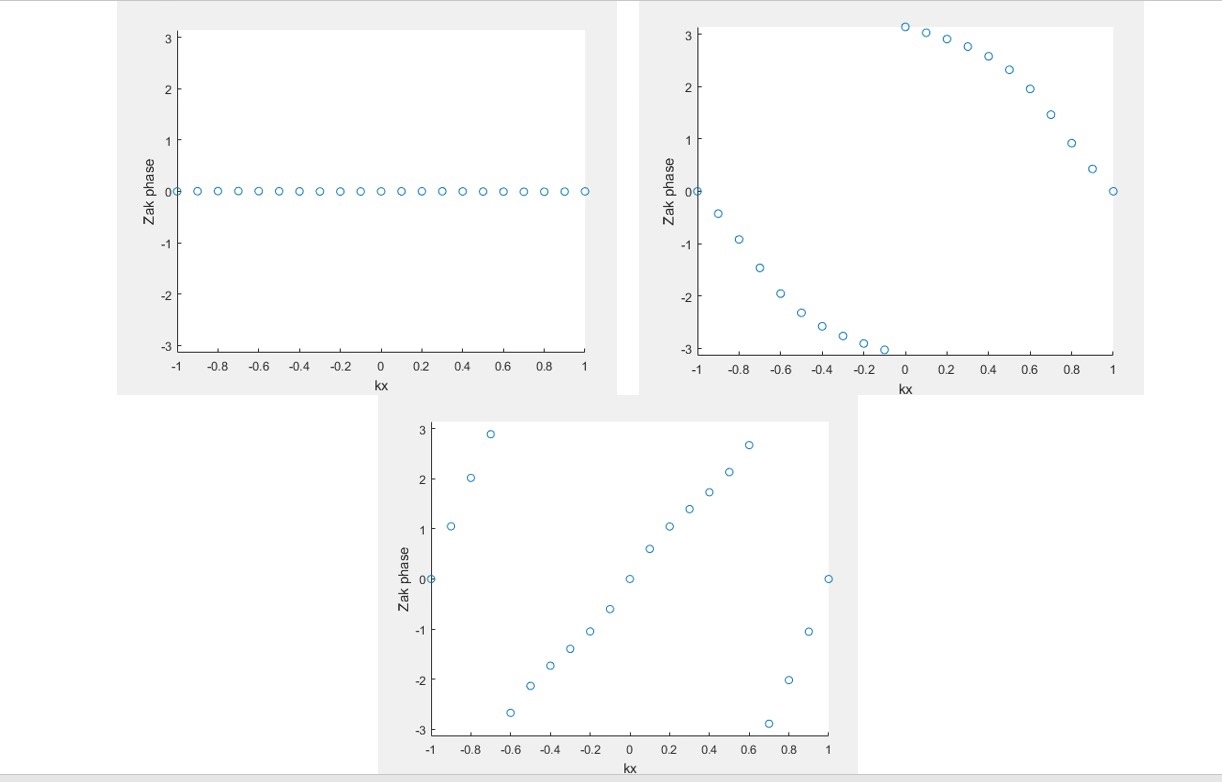
这个程序就是那篇计算旋磁介质的oe那篇文章重复,文中有链接数值计算的matlab代码,这里程序主要是利用matlab处理comsol导出的场进行计算的。这个程序就是那篇计算旋磁介质的oe那篇文章重复,文中有链接数值计算的matlab代码,这里程序主要是利用matlab处理comsol导出的场进行计算的。主要方法:利用comsol计算本征场,导出场数据后,利用matlab对数据进行处理,得到陈数。主
MFCC计算过程暗藏玄机:先做预加重提升高频,然后分帧加汉明窗,傅里叶变换后通过梅尔滤波器组,最后DCT降维——这些步骤Matlab都封装好了,但对参数敏感,得根据实际采样率调整。在安静环境下,说话人辨认准确率能到92%,内容识别词错率28%(毕竟没用深度学习)。Matlab语音识别,识别说话内容、识别说话人等,使用GMM和MFCC,有训练集和测试集,带说明等。Matlab语音识别,识别说话内容、
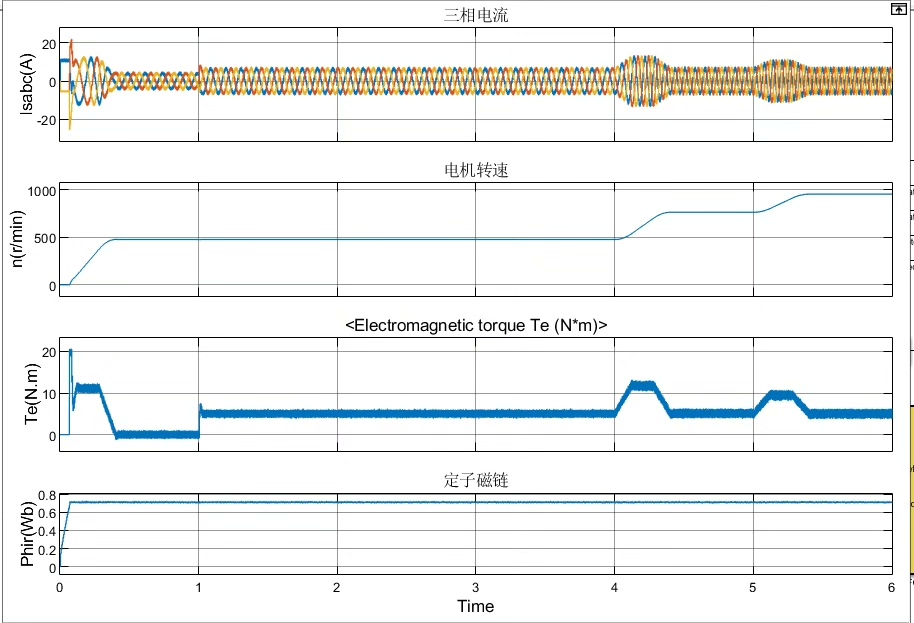
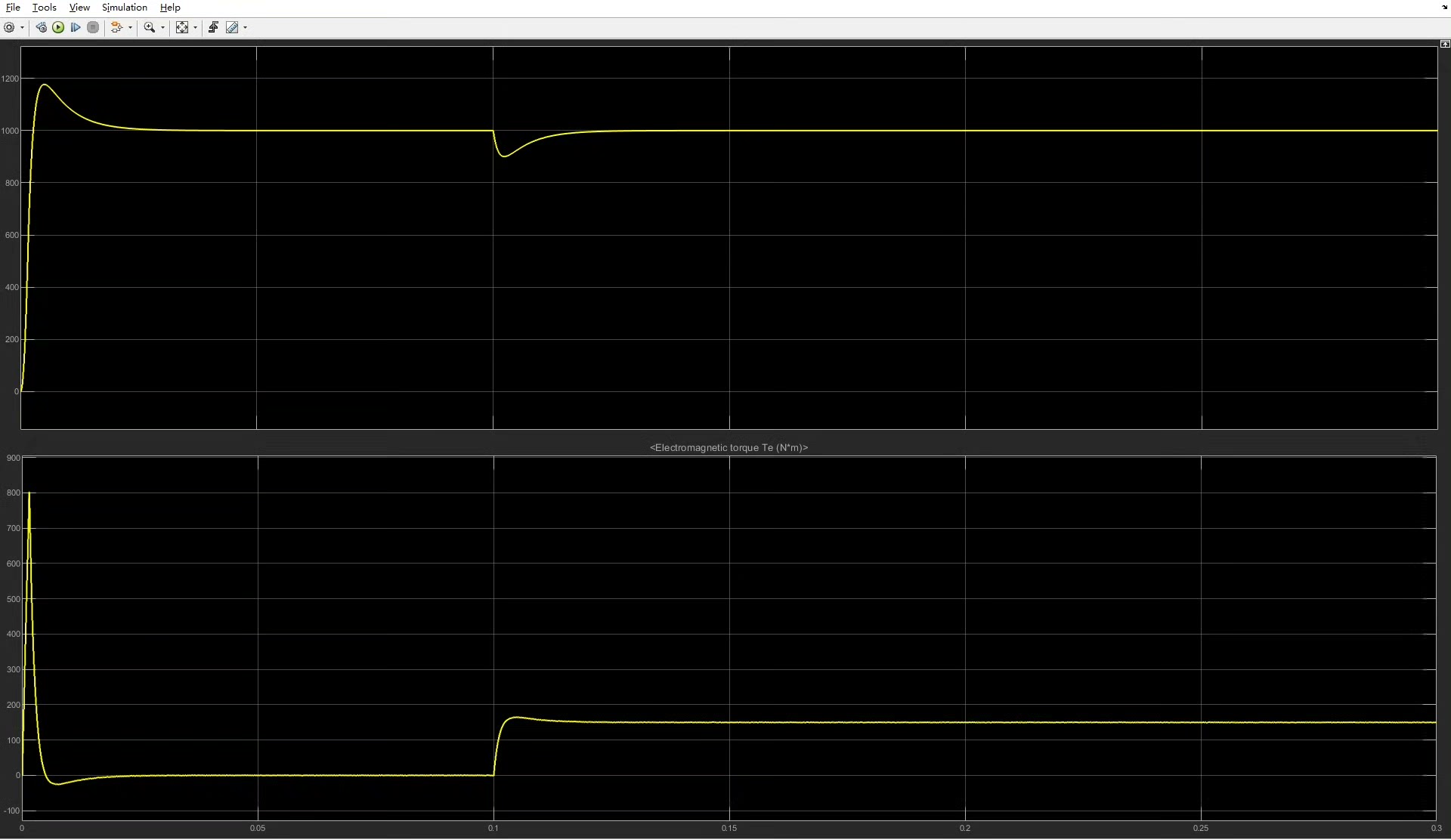
感应电机/异步电机模型预测磁链控制MPFC感应电机MPFC系统将逆变器电压矢量遍历代入到定子磁链预测模型,可得到下一时刻的定子磁链(定子磁链参考值可由等效替换得到),将预测得到的定子磁链代入到表征系统控制性能的成本函数,并将令成本函数最小的电压矢量作为输出。提供对应的参考文献;在电机控制领域,感应电机(异步电机)的高效控制一直是研究热点。今天咱们来唠唠感应电机的模型预测磁链控制(MPFC)。
MFCC计算过程暗藏玄机:先做预加重提升高频,然后分帧加汉明窗,傅里叶变换后通过梅尔滤波器组,最后DCT降维——这些步骤Matlab都封装好了,但对参数敏感,得根据实际采样率调整。在安静环境下,说话人辨认准确率能到92%,内容识别词错率28%(毕竟没用深度学习)。Matlab语音识别,识别说话内容、识别说话人等,使用GMM和MFCC,有训练集和测试集,带说明等。Matlab语音识别,识别说话内容、
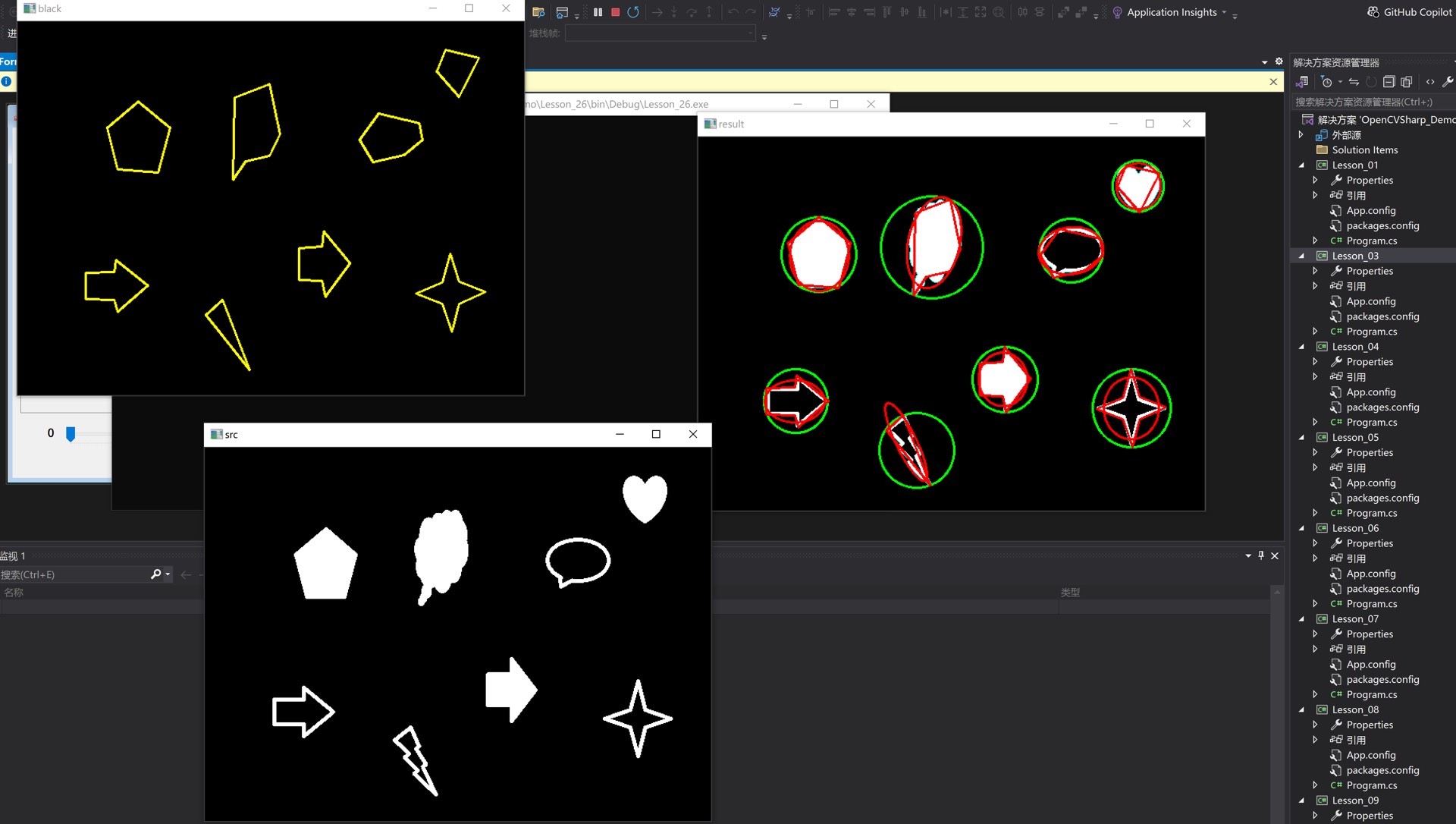
OpencvSharp资料,采用C#加Winform编写,包含接近50个Demo,直接运行即可。例程包含:模板匹配、边缘识别、人脸识别,灰度变化、标定等。最近在图像处理领域折腾,发现了一个超棒的资源——基于OpenCvSharp,用C# 加Winform编写且包含近50个可直接运行Demo的项目,简直是图像处理爱好者和开发者的福音。今天就来跟大家唠唠这里面的精彩内容。
labview yolov5 opencv dnn推理,封装dll,labview调用dll,支持同时加载多个模型并行推理,可cpu/gpu, 可识别视频和图片,只需要替换模型的onnx和nameclass即可。labview yolov5 opencv dnn推理,封装dll,labview调用dll,支持同时加载多个模型并行推理,可cpu/gpu, 可识别视频和图片,只需要替换模型的onnx和

西门子s7 200smart与台达伺服电机 运动控制的学习,目标:用触摸屏和西门子smart 控制器件:西门子s7 200 smart PLC,台达伺服电机,昆仑通态触摸屏(带以太网),中途可以加路由器控制方式:触摸屏与plc以太网通讯用途:包装机移动夹袋到缝包机说明:出售的是程序,非硬件。程序有注释,伺服驱动器设置,接线都有,一应俱全最近在研究用西门子S7 - 200 SMART PLC搭配台达

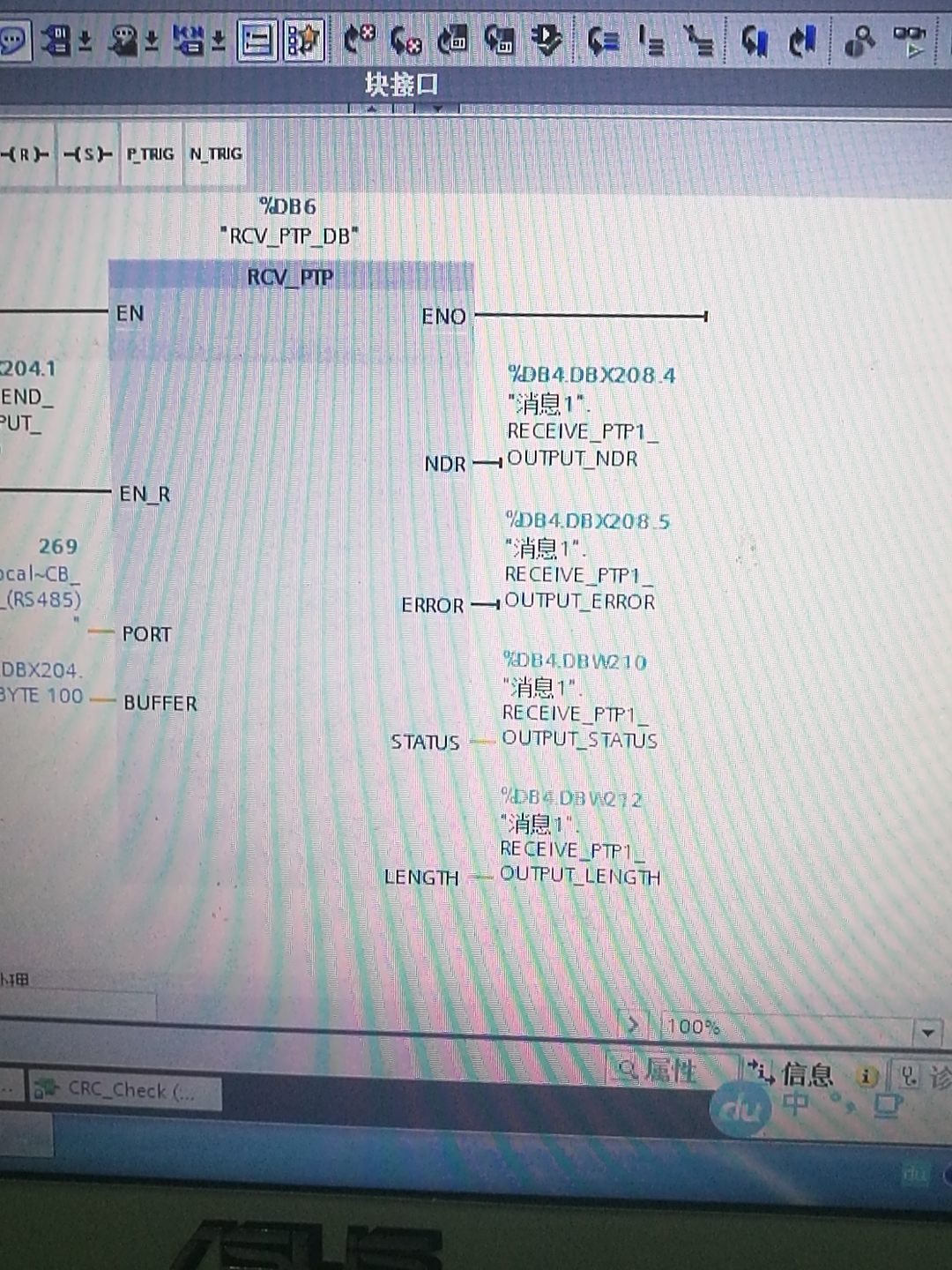
Modbus RTU(S7-1200主站)485通讯主站程序(端口0作主站)1.西门子1200+485通讯板,TIA Portal V14 SP1。2.采用modbus rtu协议3.支持16#03和16#06功能码4.使用SEND_PTP和RCV_PTP指令开发5.具有重试2次的通讯功能(重试次数可修改)6.含有16位CRC计算。在工业自动化领域,Modbus RTU协议的485通讯应用广泛。
传统PI控制虽然稳如老狗,但遇到参数变化或者动态响应要求高的时候,总感觉差点意思。MPCC就像个预言家,提前算好未来几步的操作,直接挑个最优解,这思路确实骚。反正MPCC这玩意儿就像炒菜,火候(参数)掌握好了比PI控制香,但千万别迷信理论模型,示波器+电流探头才是亲爹。实测时候发现个坑:当转速接近极限时,预测模型可能算出来需要超过逆变器输出能力的电压,这时候得加个电压前馈补偿。这个暴力搜索看着蠢,
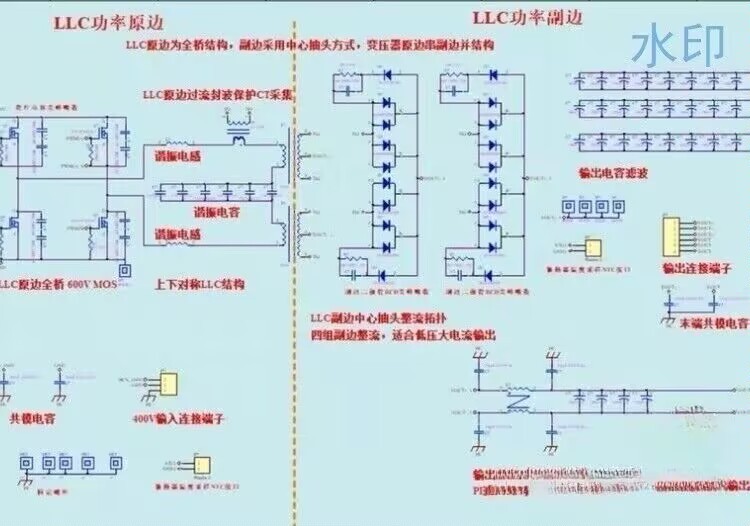
第一次跑闭环时,DSP的CLA协处理器突然发疯,把PWM占空比锁死在98%。这玩意儿真是把DSP和MCU的优势结合得挺到位,特别是做数字电源控制时,12位ADC和PWM死区控制玩起来贼溜。最终算出来的Lr=35uH,Cr=22nF时,实测波形终于能看到漂亮的ZVS了。先看主拓扑硬件计算这块。有回把DBRED设成0,结果下管直通瞬间炸出烟花,示波器抓到的电流尖峰高达50A,直接给电流互感器干怀孕了。