
写文章




- @Multiple_x
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
论文阅读笔记——ST-4DGS,WideRange4D
ST-4DGS,WideRange4D 论文阅读笔记

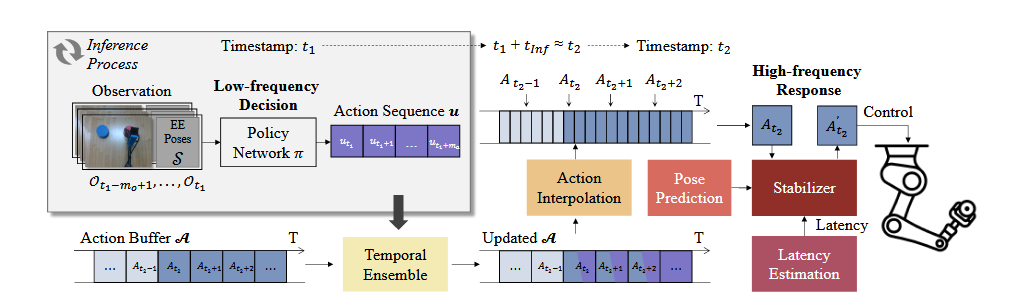
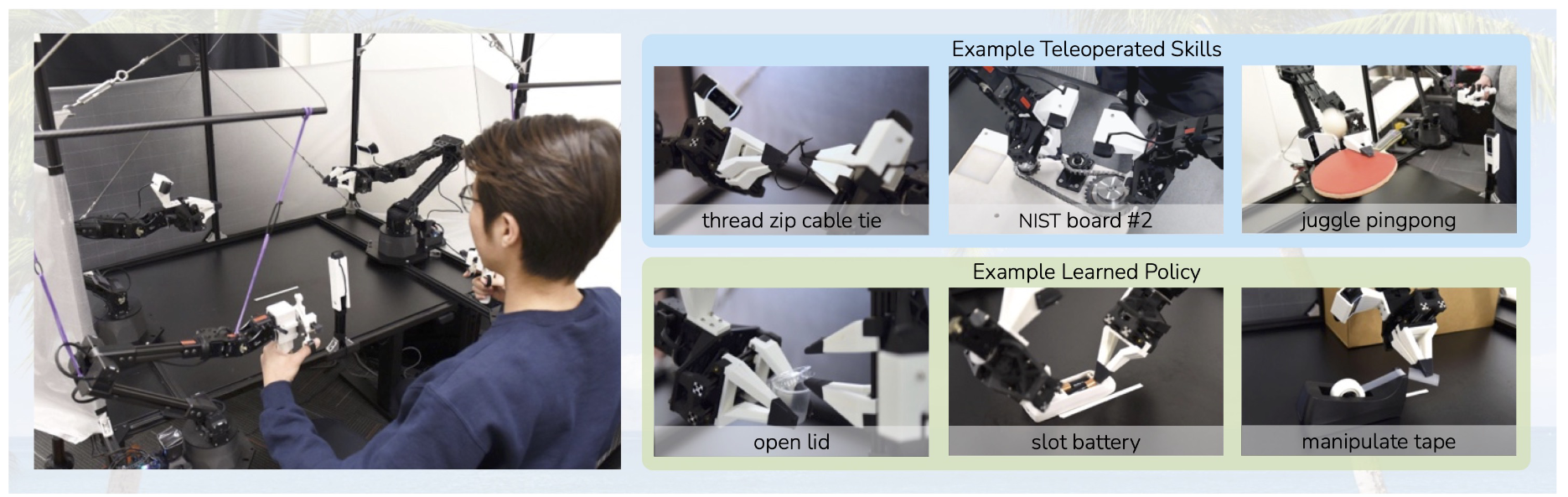
论文阅读笔记——STDArm
STDArm: Transferring Visuomotor Policies FromStatic Data Training to Dynamic RobotManipulation 论文阅读笔记
论文阅读笔记——Diffuser,Diffusion Policy
Diffuser,Diffusion Policy 论文阅读笔记

论文阅读笔记——ST-4DGS,WideRange4D
ST-4DGS,WideRange4D 论文阅读笔记
论文阅读笔记——Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware 论文阅读笔记
到底了