- @Ltr_20213962
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
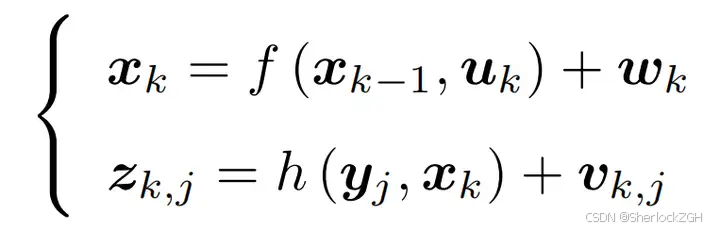
对f(x)Taylor展开,而不是F(x)。对f(x)一阶Taylor展开,然后再取范数取平方,我们就得到了与F(x)的二阶Taylor近似的式子。对F(x)求导求极值点,但是这需要知道F(x)的全局性质,使用迭代的方法,问题的核心转化为如何寻找能让F(x)的值不断下降的△ xk。概率学模型来表示SLAM问题:P(x,y|z,u),即已知所有时刻的输入u和观测z,求解x,y的条件概率分布。H(x)
个人简单理解为,是一种表示拓扑关系、不存在准确距离信息的地图,例如:我家地图是,客厅在中间,周围连着卧室、书房、厨房、卫生间,书房又连着阳台。(OctoMap)、栅格地图(Grid Map)等都属于度量地图,能够从这个地图中获取具体的尺度信息,例如某个点距离某个点多远、XXX障碍物面积有多大。拓扑地图注重表示环境的连接关系,而不是具体的几何细节。稀疏地图例如视觉SLAM建立的特征点地图,是稀疏的,
随着系统的运行,后端收到的位姿和路标数量会越来越多,BA优化所需要的时间也会越来越长。BA过程中,会发现路标点位置在迭代几次后,基本不发生变化,所以可以在优化几次后,不再优化,仅仅将它们当作相机位姿估计的约束。由此,可仅对轨迹进行优化,位姿节点之间的边表示两个相机的相对运动,即位姿图。位姿图的节点表示相机位姿,边表示两个位姿节点之间的相对运动的估计,该估计可以来自于特征点法或直接法,也可以来自GP
光流法有两种,一种是计算部分像素运动的稀疏光流,另外一种是计算所有像素运动的稠密光流。它假设一个像素在不同的图像中是固定不变的,可以通过相邻像素的颜色梯度和自身像素的颜色变化来描述。也就是通过相邻像素梯度和运行速度得到自身该位置的颜色值变化,列出一个方程,以此来描述图像的平移。我们要求的是ζ的优化值,假设ei有偏差,那么J(ζ)有如何的变动呢?事实上,若相机位置的变化或者目标位置变化但相机固定,P

H矩阵称为邻接矩阵, 描述了第(i,j)元素,若两个顶点存在联系,则该位置元素不为0,H矩阵中的非对角部分的非零矩阵块可以理解为其对应的两个变量之间存在联系,即约束。后端优化:当前状态只由过去的时刻决定,或只由前一个时刻决定,称为“渐进式”。代价函数对误差取二范数,所带来的缺点是若存在误匹配的情况,会造成代价很大,优化时也仅对误匹配的量进行优化,而鲁棒核函数可以解决该问题,常用的有Huber核。当

计算小块间差异的方法:SAD(差的绝对值之和,Sum of Absolute Difference)、SSD(平方和,Sum of Squared Distance)、NCC(归一化互相关,Normalized Cross Correlation)去均值的SAD、去均值的SSD等……而SLAM实时性要求较高,前端已经占据了不少的计算量,所以在建图中,我们通常采用计算量较少的滤波器方式。1、2两种方
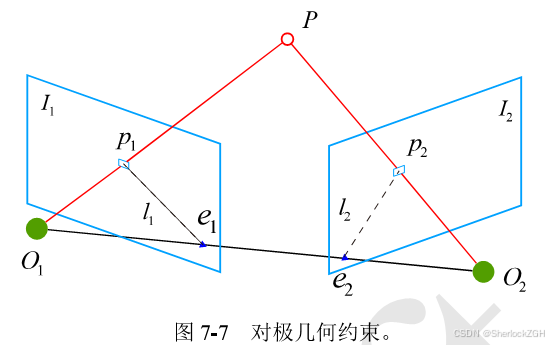
一般需要先提取两幅图像的特征点,然后进行匹配,根据匹配的特征点估计相机运动。其中,P1和P2表示像素坐标,K表示相机内参,t和R表示相机运动。t有12个未知量,可通过6对匹配点,即可线性求解,超过6对时,可通过最小二乘求解。假设我们从两张图像中,得到了若干对这样的匹配点,就可以通过这些二维图像点的对应关系,恢复出在两帧之间摄像机的运动。在pnp问题中,空间点位置已知,仅为优化相机位姿T的问题。仅使