
写文章




- @LiongLoure
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
[足式机器人]Part4 南科大高等机器人控制课 Ch04 Exponential Coordinate of Rigid Body Configuration
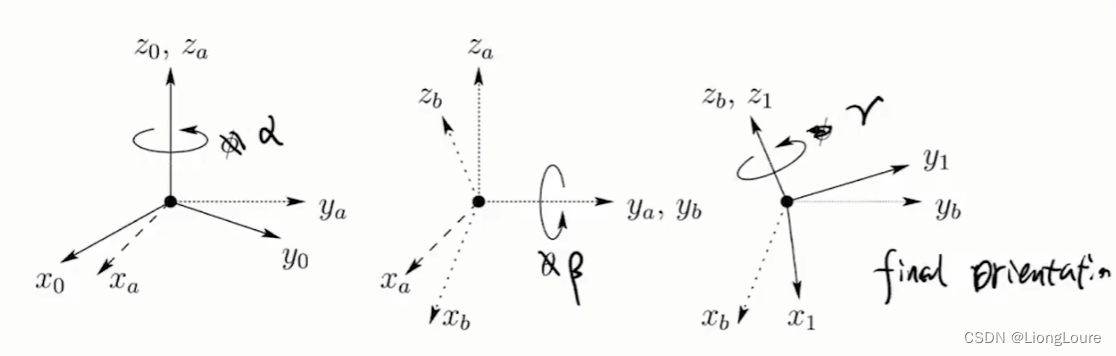
本文仅供学习使用本文参考:B站:CLEAR_LAB笔者带更新-运动学课程主讲教师:Prof. Wei Zhang南科大高等机器人控制课 Ch04 Exponential Coordinate of Rigid Body Configuration1. Exponential Coordinate of SO(3) - rotation matrix1.1 Towards Exponential C
[足式机器人]Part4 南科大高等机器人控制课 CH11 Bascis of Optimization
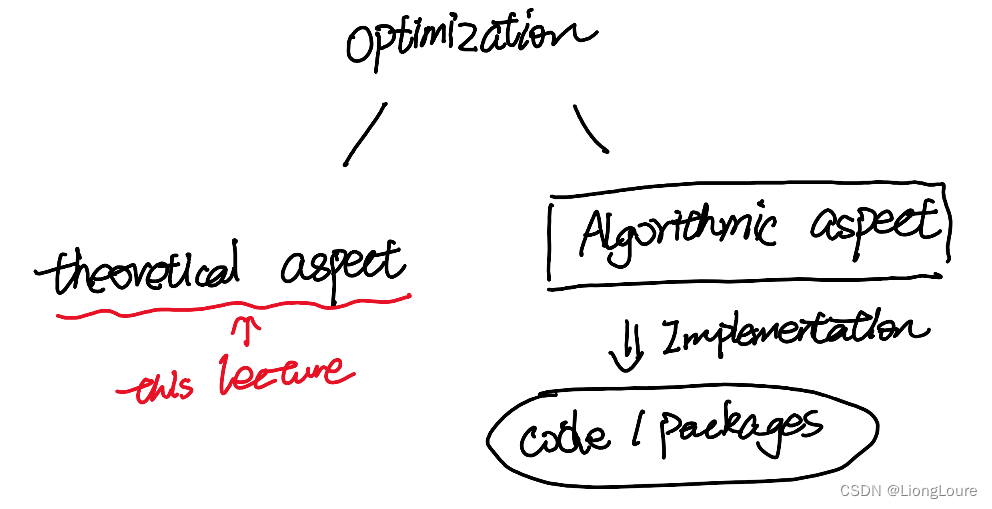
本文仅供学习使用本文参考:B站:CLEAR_LAB笔者带更新-运动学课程主讲教师:Prof. Wei Zhang课程链接 :https://www.wzhanglab.site/teaching/mee-5114-advanced-control-for-robotics/南科大高等机器人控制课 Ch11 Bascis of Optimization1. Motivation2. Some Lin
[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-1最优控制问题与性能指标
本文仅供学习使用B站:DR_CAN。
[足式机器人]Part5 ROS2学习笔记-CH00-1-基础入门部分
ROS2使用:Humble版本 + Linux系统(22.04)ROS(Robot Operating System)机器人操作系统,但ROS本身并不是一个操作系统,而是可以安装在现在已有的操作系统上(Linux、Windows、Mac)上的软件库和工具集机器人,我们对其进行拆解。可以分为感知(激光雷达、深度相机、IMU、里程计、碰撞感知、建图)、决策(路径规划(navigation)算法、定位算

[足式机器人]Part3机构运动微分几何学分析与综合Ch01-1 平面运动微分几何学——【读书笔记】
笔者将试图将王德伦教授的机构运动微分几何学引入机器人行走问题的研究中,对此进行分析与学习
到底了