写文章




- @LYH6767
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
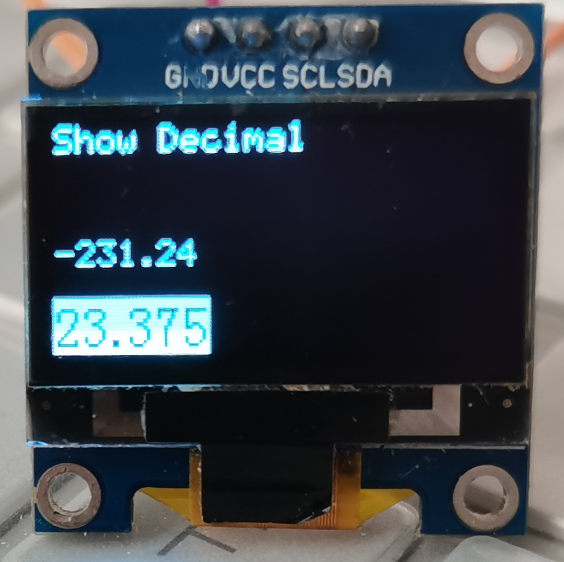
7针0.96寸OLED的HAL库代码(硬件SPI/全代码/stm32f1/CubeMX配置/包含有正负浮点数/100%一次点亮)
7针0.96寸OLED的 #硬件SPI #HAL库版驱动代码(STM32F103)
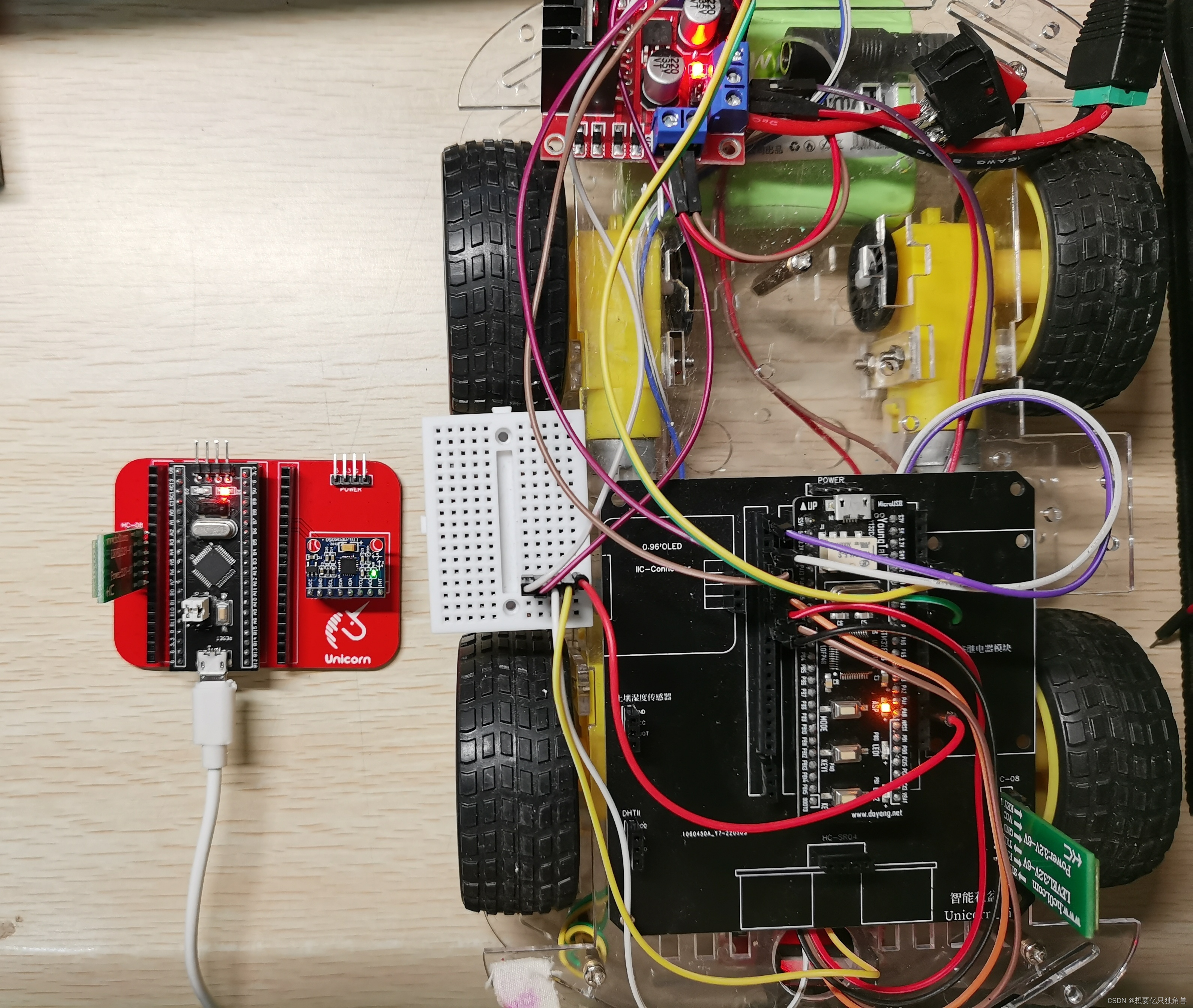
HAL库版STM32双轮自平衡车(一) ———代码思路和PID基础精讲
系列文章第一篇将重点讲解一下怎么编写平衡小车代码的思路以及一些基础的PID知识点,超详细

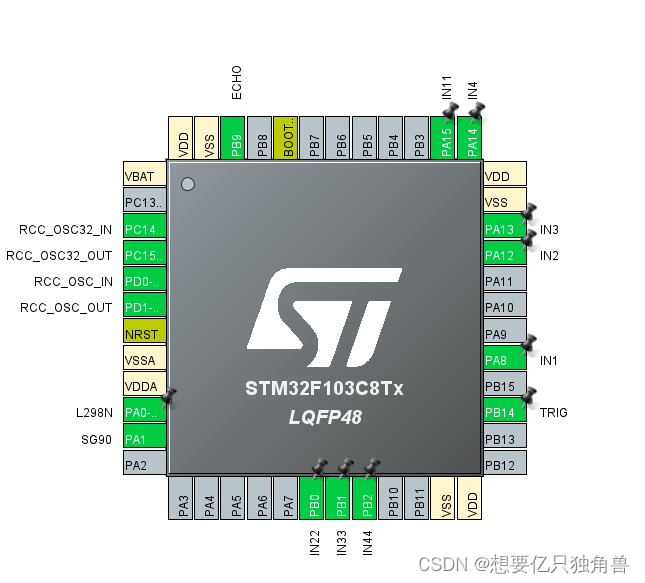
HC-SR04超声波模块的使用(stm32f103c8t6/HAL)(超详细)
本文主要介绍超声波模块HC-SR04的两种基于HAL库的使用方法,每一步代码都会有详细的解释说明。

HAL库版STM32双轮自平衡车(四) ———— 原理图以及PCB绘制
平衡小车原理图以及PCB的立创EDA开源链接。可以自己打个板试试哈

HAL库版STM32双轮自平衡车(三) ———代码精讲
上一篇文章重点讲解了CubeMX的配置、原理图接线、物料准备,那么接下来本文将一步步开始编写小车的代码,精讲其中的代码原理。

HAL库版STM32双轮自平衡车(二) ——— CubeMX的配置、原理图接线、物料准备
本文介绍了CubeMX的相关配置,物料,接线以及其中要注意的“大坑”,之后也就是下一篇文章重点介绍HAL库版代码的编写以及实现。

STM32方位感知操控蓝牙小车(stm32f103c8t6/HAL库/mpu6050+双蓝牙透传)
**手柄方向感知操控**可以简单理解为向前倾--->小车前进,后倾--->小车后退,左倾--->小车左转,右倾--->小车右转,水平放置时--->小车停止。
STM32超声波避障小车(舵机云台+超声波/stm32f103/HAL/Cube)
基于STM32C8T6HAL库编写的基础避障小车,舵机云台+超声波
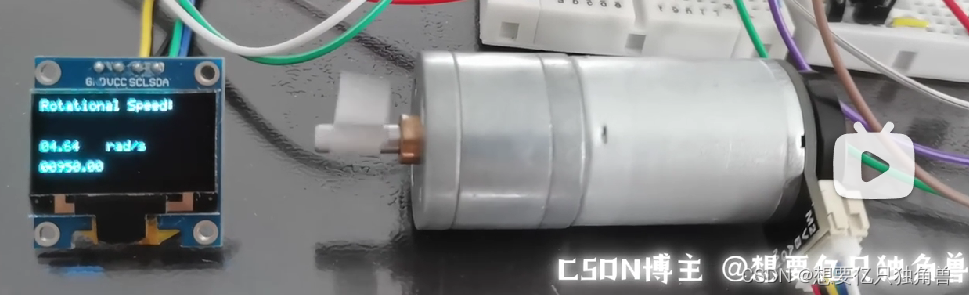
编码电机测速(stm32f1/HAL库/CubeMX/编码器模式/平衡小车/直流减速电机/超详细)
本文将十分详细地介绍如何使用stm32f103c8t6的编码器模式测量带15线霍尔编码器的直流减速电机的空载转速。
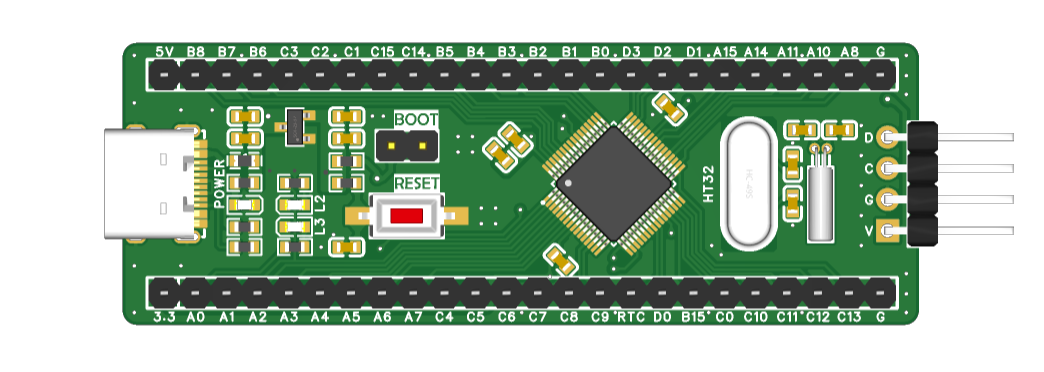
合泰HT32F52352入门教程(# 1W+字 博客帮您快速上手,拿奖不是梦 #)
这篇文章的代码均经过本人烧写验证,1W字文章帮你快速上手HT32F52352