




- @EHagSJVNpTY
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
通过以上基于情感词典、LSTM 算法和 SVM 的方法,我们可以有效地对微博文本进行情感分析。每种方法都有其优缺点,情感词典方法简单直观但依赖词典质量;LSTM 能自动学习文本特征但训练成本较高;SVM 在小数据集上可能表现较好且训练速度相对较快。在实际项目中,可以根据具体需求和数据特点选择合适的方法,或者结合多种方法以获得更好的效果。希望大家能从这个大数据分析项目中对 Python 在文本情感分

本项目是一套基于STM32F10x 系列 MCU的大功率直流电机驱动控制系统,采用IR2103S 半桥驱动芯片 + N 沟道 MOSFET构成 H 桥电路,实现对直流电机的双向调速、启停控制、编码器反馈采集、串口通信调试等功能。高电压/大电流驱动能力(适用于 12V~36V 电机);硬件级死区控制与防直通保护;编码器测速反馈,实现闭环控制基础;串口通信支持调试与虚拟示波器功能;模块化设计,便于扩展
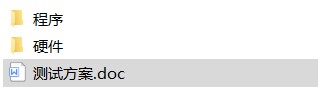
最后分享个冷知识:把变流器开关频率从2kHz改成3kHz,系统效率能提升0.8%,但散热器温度会飙升15℃。模型跑通后,试着把风速提到15m/s以上,看看crowbar保护电路会不会动作——那电流尖峰绝对让你印象深刻。咱们先拆解整个系统:机侧变流器负责控制发电机转速,网侧变流器维持直流母线电压,中间夹着那个关键的背靠背变流器结构。接上这个模型后,记得给发电机加个惯性环节,J参数设6秒左右,太大会导
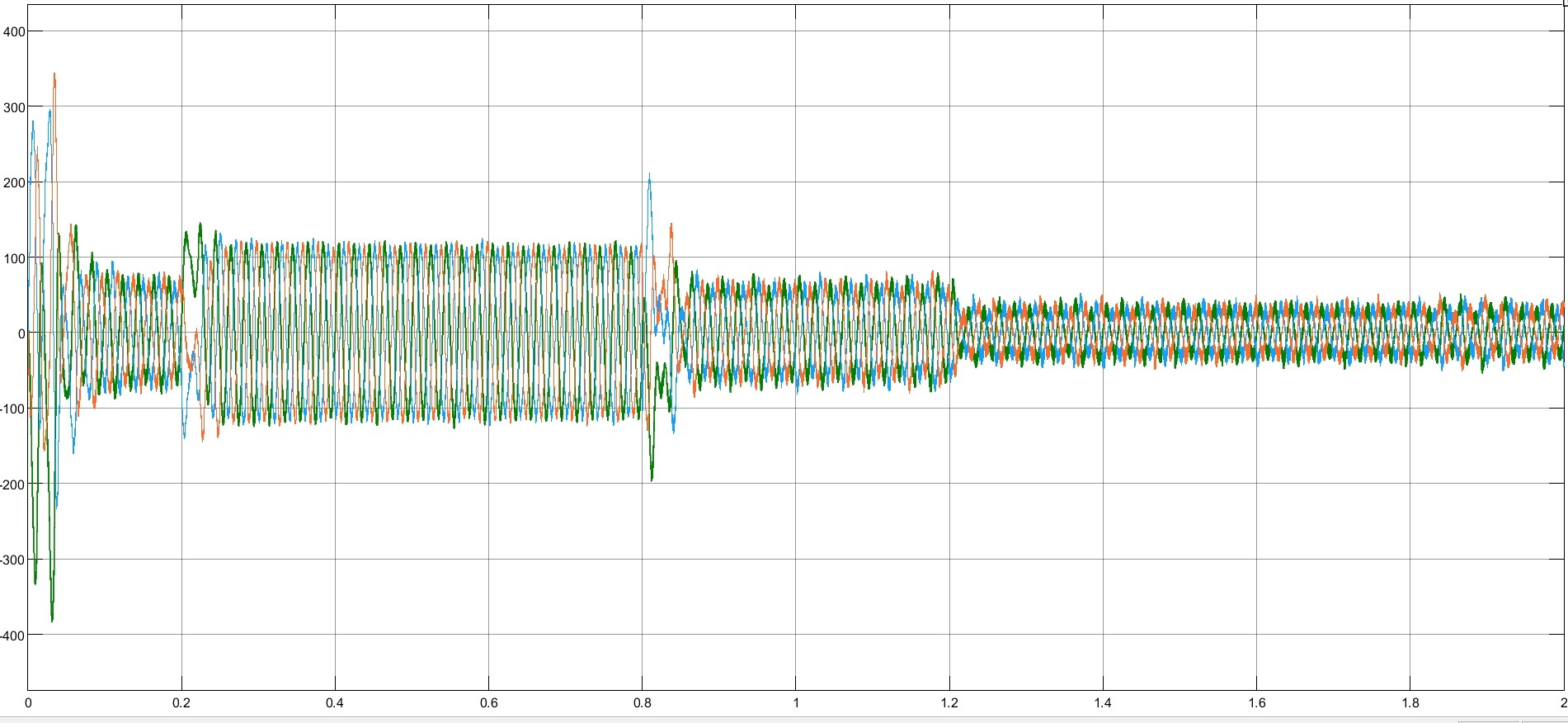
MISSA-BP 分类预测模型是一款融合改进麻雀搜索算法(Modified Improved Sparrow Search Algorithm, MISSA)与反向传播(Back Propagation, BP)神经网络的智能分类工具。该模型通过 MISSA 算法优化 BP 神经网络的初始权值与阈值参数,有效解决了传统 BP 神经网络易陷入局部最优、收敛速度慢等问题,显著提升了分类预测的准确性与稳
Qt+OpenCV图像视觉框架全套源码上位机源码工具可扩展。除了opencv和相机sdk的dll,其它所有算法均无封装,可以根据自己需要补充自己的工具。基于 Qt5.14.2 + VS2019 + OpenCV 开发实现,支持多相机多线程,每个工具都是单独的 DLL,主程序通过公用的接口访问以及加载各个工具。包含涉及图像算法的工具、 逻辑工具、通讯工具和系统工具等工具。最近捣鼓了一个超有趣的项目—
初始化阶段,我们生成一个初始解,这个解可以是一个简单的贪心解,或者随机生成的解。接下来,在破坏阶段,我们随机移除一部分解中的元素,比如在配送问题中,我们可以随机移除一些配送点。然后,在修复阶段,我们通过某种策略重新插入这些被移除的元素,生成一个新的解。在无人机与车辆混合配送问题中,破坏策略可以设计为随机移除一些配送点,或者移除某些特定的配送点(比如距离较远的点)。比如,在无人机与车辆混合配送问题中
负样本就是不带行人的背景图,比如街道、草地、车流啥的,数量最好比正样本多一点,我当时是1:3的比例,大概2000张正样本配6000张负样本,负样本找的时候一定要仔细,别把行人混进去,不然训练出来的模型会瞎识别。这个代码其实挺直白的,就是遍历文件夹里的所有图片,统一缩成要求的尺寸,负样本的预处理也是一样的逻辑,只是不用抠图,直接用原图缩就行,毕竟负样本只要尺寸对就行。我当时第一次训练的时候就是改了b

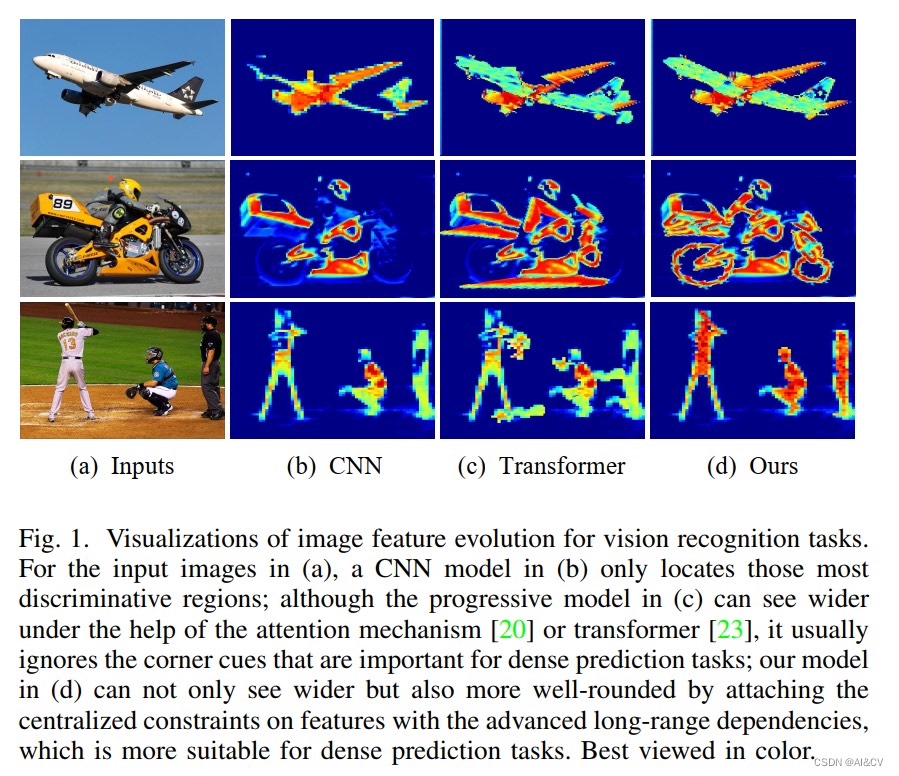
CVPR2023中,注意力机制的改进为YOLO系列模型带来了显著的性能提升。从YOLOv5到YOLOv8,研究者们通过引入更高效的注意力计算方式、多尺度注意力融合以及动态注意力权重机制,使得模型在准确率、推理速度和模型轻量化方面都有了显著的提升。这些改进不仅体现了研究者们在目标检测领域的深厚积累,也展示了注意力机制在计算机视觉领域的广泛应用前景。未来,随着更多创新注意力机制的引入,目标检测模型的性
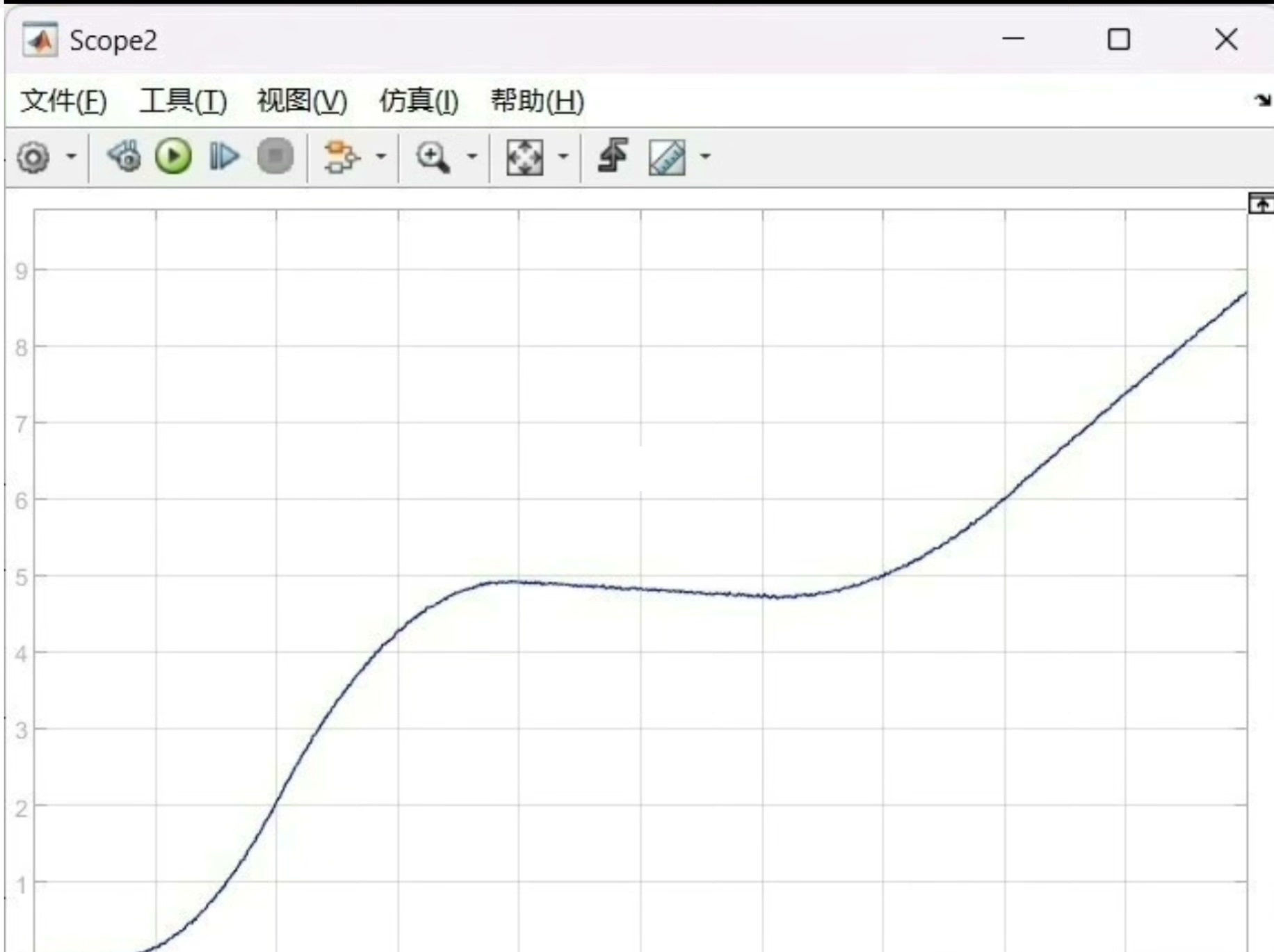
经过实测验证,这套组合算法在3度以内的坡度估计误差小于0.5度,且能在5秒内识别出质量变化。有个工程细节值得注意:当检测到坡度连续5个周期变化超过0.3度/秒时,自动增大过程噪声协方差,显著改善了山路工况下的跟踪性能。特别要注意观测矩阵H中的m_est参数,这里正是两个估计算法耦合的关键点——质量估计的精度直接影响坡度观测方程的可靠性。车辆坡度与质量识别模型,基于扩展卡尔曼滤波,估计曲线与实际误差
分享个真实案例:某车型的扭矩仲裁模块藏着个魔鬼细节——当同时收到刹车和油门信号时,有个0.2秒的延迟保护。用Jenkins+Allure生成动态测试看板,哪个用例变红立刻定位到具体决策逻辑模块,这才是互联网时代搞汽车电子的正确姿势。用MATLAB/Simulink搞MIL的兄弟都懂,模型在环测试最怕模型和代码"两张皮"。别被那些等价类划分、边界值分析吓到,记住这个核心原则:控制器是吃信号吐决策的黑
