




- @Dojinz
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
华为Altas 200IDK A2开发板自身提供了YOLOV5的测试demo,但开发者如果想调用YOLOV8进行目标检测,需要将其pt文件转换为om文件,同时修改运行代码,以下为项目经历分享。本文主要是通过华为Altas 200DK A2开发板,运行转换好的om文件,实现针对摄像头的实时目标识别,是一次不错的实践经历,欢迎各位交流讨论。

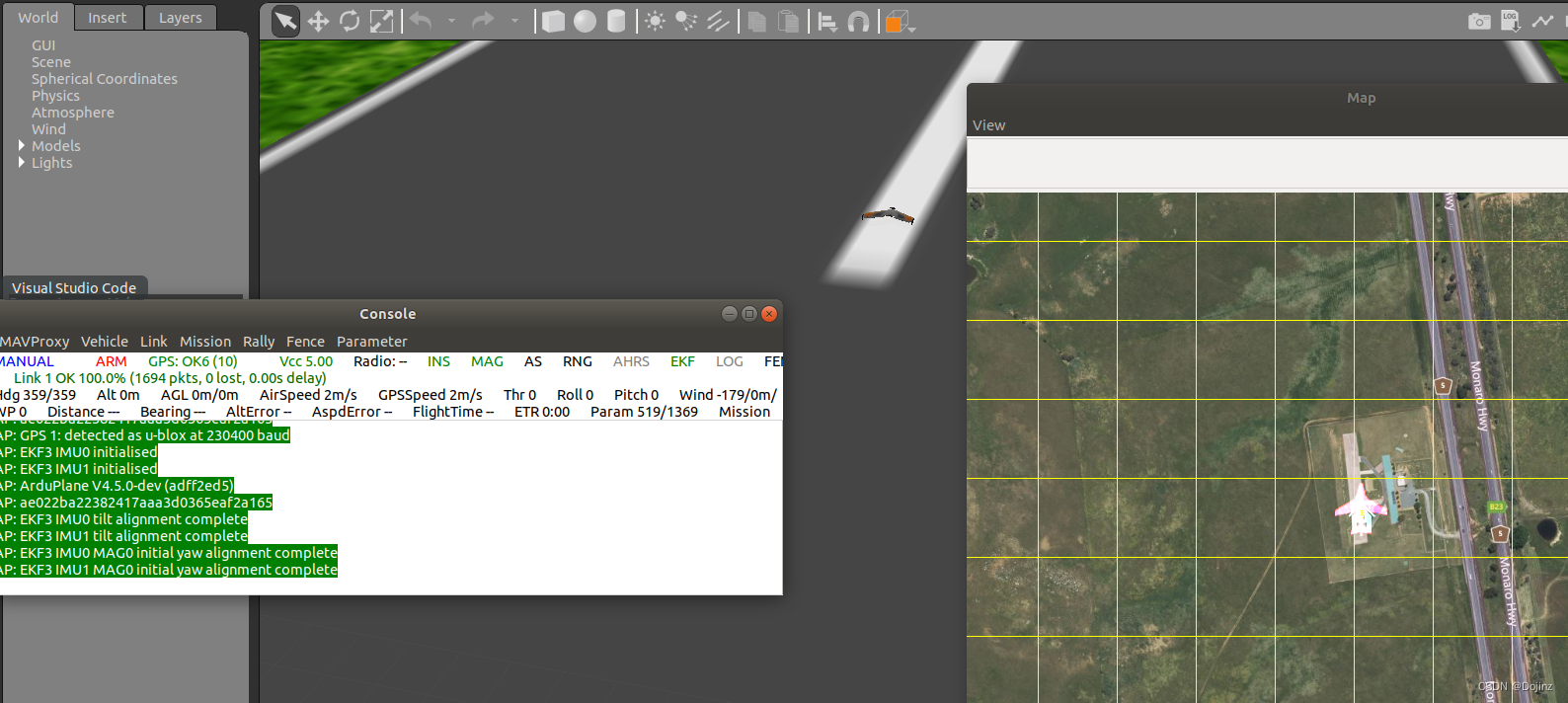
目前互联网平台中关于无人机仿真的博客或视频主要针对PX4固件,对于APM固件的仿真内容较少,本文用于记录个人在学习与仿真过程中遇到的问题及解决方法。请确保你已安装ROS。相对来说,直接使用Ubuntu自带的3.6.9python环境会更加容易搭建仿真环境,anaconda的环境始终会出一些问题,QGC联合仿真后面再更新。
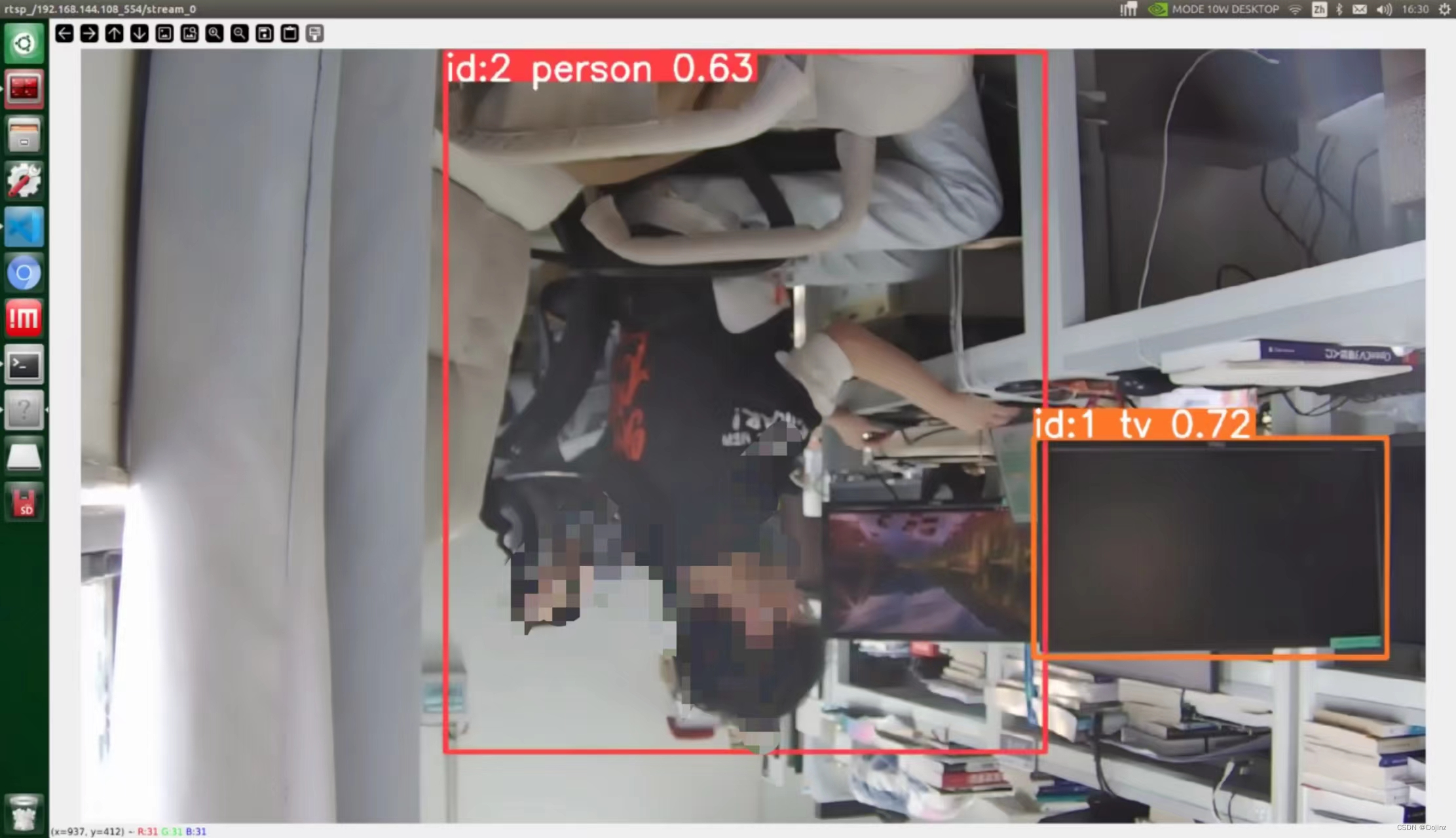
本文主要通过yolov8识别对象信息,并通过ros的话题通信回传识别结果与目标坐标,最终通过控制摄像头的舵机转动,让目标对象保持在图像中央。float64 xfloat64 yfloat64 wfloat64 h本文主要是通过ROS通信,同时调用yolo和吊舱,并通过头文件和源文件进行吊舱控制,也利用了自定义消息优化了消息格式,是一次不错的实践经历,欢迎各位交流讨论。
本文主要通过yolov8识别对象信息,并通过ros的话题通信回传识别结果与目标坐标,最终通过控制摄像头的舵机转动,让目标对象保持在图像中央。float64 xfloat64 yfloat64 wfloat64 h本文主要是通过ROS通信,同时调用yolo和吊舱,并通过头文件和源文件进行吊舱控制,也利用了自定义消息优化了消息格式,是一次不错的实践经历,欢迎各位交流讨论。
华为Altas 200IDK A2开发板自身提供了YOLOV5的测试demo,但开发者如果想调用YOLOV8进行目标检测,需要将其pt文件转换为om文件,同时修改运行代码,以下为项目经历分享。本文主要是通过华为Altas 200DK A2开发板,运行转换好的om文件,实现针对摄像头的实时目标识别,是一次不错的实践经历,欢迎各位交流讨论。
华为Altas 200IDK A2开发板自身提供了YOLOV5的测试demo,但开发者如果想调用YOLOV8进行目标检测,需要将其pt文件转换为om文件,同时修改运行代码,以下为项目经历分享。本文主要是通过华为Altas 200DK A2开发板,运行转换好的om文件,实现针对摄像头的实时目标识别,是一次不错的实践经历,欢迎各位交流讨论。